Interested Article - Электрический привод

- 2020-08-12
- 2
Электрический привод (сокращённо — электропривод, ЭП) — управляемая электромеханическая система, предназначенная для преобразования электрической энергии в механическую и обратно и управления этим процессом.
Современный электропривод — совокупность множества электромашин, аппаратов и систем управления ими. Он является основным потребителем электрической энергии (до 60 %) и главным источником механической энергии в промышленности.
В ГОСТ Р 50369-92 электропривод определён как электромеханическая система, состоящая из преобразователей электроэнергии , электромеханических и механических преобразователей, управляющих и информационных устройств и устройств сопряжения со внешними электрическими, механическими, управляющими и информационными системами, предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением в целях осуществления технологического процесса .
Как видно из определения, исполнительный орган в состав привода не входит. Однако авторы авторитетных учебников включают исполнительный орган в состав электропривода. Это противоречие объясняется тем, что при проектировании электропривода необходимо учитывать величину и характер изменения механической нагрузки на валу электродвигателя, которые определяются параметрами исполнительного органа. При невозможности реализации прямого привода электродвигатель приводит исполнительный орган в движение через кинематическую передачу. КПД , передаточное число и пульсации, вносимые кинематической передачей, также учитываются при проектировании электропривода.

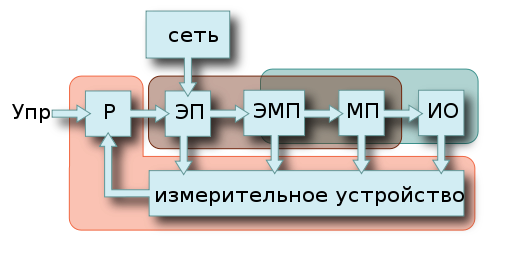
Функциональная схема

Функциональные элементы:
- Регулятор (Р) предназначен для управления процессами, протекающими в электроприводе.
- Электрический преобразователь (ЭП) предназначен для преобразования электрической энергии сети в регулируемое напряжение постоянного или переменного тока.
- Электромеханический преобразователь (ЭМП) — двигатель, предназначен для преобразования электрической энергии в механическую.
- Механический преобразователь (МП) может изменять скорость вращения двигателя.
- Упр — управляющее воздействие.
- ИО — исполнительный орган.
Функциональные части:
- Силовая часть или электропривод с разомкнутой системой регулирования.
- Механическая часть.
- Система управления электропривода .
Характеристики привода
Статические характеристики
Под статическими характеристиками чаще всего подразумеваются электромеханическая и механическая характеристика.
Механическая характеристика
Механическая характеристика — это зависимость угловой скорости вращения вала от электромагнитного момента M (или от момента сопротивления Mc ). Механические характеристики являются очень удобным и полезным инструментом при анализе статических и динамических режимов электропривода.
Электромеханическая характеристика двигателя
Электромеханическая характеристика — это зависимость угловой скорости вращения вала ω от тока I.
Динамическая характеристика
Динамическая характеристика электропривода — это зависимость между мгновенными значениями двух координат электропривода для одного и того же момента времени переходного режима работы.
Классификация электроприводов
По количеству и связи исполнительных, рабочих органов:

- Индивидуальный, в котором рабочий исполнительный орган приводится в движение одним самостоятельным двигателем, приводом.
- Групповой, в котором один двигатель приводит в действие исполнительные органы РМ или несколько органов одной РМ.
- Взаимосвязанный, в котором два или несколько ЭМП или ЭП электрически или механически связаны между собой с целью поддержания заданного соотношения или равенства скоростей, или нагрузок, или положения исполнительных органов РМ.
- Многодвигательный, в котором взаимосвязанные ЭП, ЭМП обеспечивают работу сложного механизма или работу на общий вал.
- Электрический вал, взаимосвязанный ЭП, в котором для постоянства скоростей РМ, не имеющих механических связей, используется электрическая связь двух или нескольких ЭМП.
По типу управления и задаче управления:
- Автоматизированный ЭП, управляемый путём автоматического регулирования параметров и величин.
- Программно-управляемый ЭП, функционирующий через посредство специализированной управляющей вычислительной машины в соответствии с заданной программой.
- Следящий ЭП, автоматически отрабатывающий перемещение исполнительного органа РМ с заданной точностью в соответствии с произвольно меняющимся сигналом управления.
- Позиционный ЭП, автоматически регулирующий положение исполнительного органа РМ.
- Адаптивный ЭП, автоматически избирающий структуру или параметры устройства управления с целью установления оптимального режима работы.
По характеру движения:
- ЭП со вращательным движением.
- Линейный ЭП с линейными двигателями.
- Дискретный ЭП с ЭМП, подвижные части которого в установившемся режиме находятся в состоянии дискретного движения.
По наличию и характеру передаточного устройства:
- Редукторный ЭП с редуктором или мультипликатором.
- Электрогидравлический с передаточным гидравлическим устройством.
- Магнитогидродинамический ЭП с преобразованием электрической энергии в энергию движения токопроводящей жидкости.
По роду тока:
- Переменного тока.
- Постоянного тока.
По степени важности выполняемых операций:
- Главный ЭП, обеспечивающий главное движение или главную операцию (в многодвигательных ЭП).
- Вспомогательный ЭП.
- Привод передач.
Автоматизированные электроприводы подразделяются ещё на две подгруппы — разомкнутые и замкнутые. Работа разомкнутого привода заключается в том, что все внешние возмущения (для электрических приводов самым характерным из них является момент нагрузки) оказывают влияние на выходную переменную электрического привода, как пример - на его скорость. Иными словами, разомкнутый электрический привод не изолирован от влияния внешних возмущений, все изменения которых отражаются на его рабочих показателях. В разомкнутом приводе по этой причине не может обеспечиться высокий уровень качества регулирования переменных, хотя данный привод отличается простой схемой.
Основным отличием замкнутых электрических приводов является их общее или локальное удаление воздействий внешних возмущений на управляемую переменную электрического привода. В качестве примера можно привести тот факт что, скорость таких электрических приводов может оставаться практически неизменной при возможных колебаниях момента нагрузки. В силу этого обстоятельства замкнутый привод обеспечивает более качественное управление движением исполнительных органов, хотя его схемы являются более сложными и требуют, зачастую, применения силовых преобразователей энергии.
Замкнутый электропривод

Замкнутый электрический привод может быть построен по принципам отклонения с использованием обратных связей или компенсации внешнего возмущения.
Принцип компенсации мы можем рассмотреть на примере компенсации наиболее явно выраженного внешнего возмущения электропривода — момента нагрузки М с при регулировании его скорости (рис.а).Основным признаком такой замкнутой структуры электрического привода является наличие цепи, по которой на вход привода вместе с задающим сигналом скорости подаётся сигнал U M = k M M Q , пропорциональный моменту нагрузки М с . В результате этого управление ЭП осуществляется суммарным сигналом ошибки, который автоматически изменяется в нужную сторону при колебаниях момента нагрузки, обеспечивая с помощью системы управления поддержание скорости ЭП на заданном уровне.
Несмотря на свою высокую эффективность, электрические приводы по данной схеме выполняются крайне редко из-за отсутствия простых и надёжных датчиков момента нагрузки М с (возмущающего воздействия).В связи с данным фактом подавляющее количество замкнутых структур электроприводов используют принцип обратной связи (отклонения). Он характеризуется тем что имеет цепь обратной связи, соединяющую выход электрического привода с его входом, отсюда и пошло название замкнутых схем.
Все виды применяемых в замкнутых электрических приводах обратных связей делятся на положительные и отрицательные, жёсткие и гибкие, линейные и нелинейные.
Положительной называется обратная связь, в которой сигнал направлен согласно и складывается, с управляющим сигналом, в то время как сигнал отрицательной связи направлен в противоположную сторону (знак «минус» на рис. б).Жёсткая обратная связь охарактеризована тем, что данная связь действует как в установившемся режиме, так и в переходном режиме электрического привода. Сигнал гибкой обратной связи производится только в переходных режимах электропривода и используется для обеспечения требуемого им качества, как пример устойчивости движения, допустимого перерегулирования и т.д.
Линейная обратная связь охарактеризована своей пропорциональной зависимостью между управляемой координатой и сигналом обратной свﮦязﮦи, в то время как при производстве нелинейной связи эта зависимость не будет пропорциональной.
Для регулирования движения исполнительных органов эксплуатируемых машин иногда требуется изменять несколько переменных электрического привода, например ток, момент и скорость. В таком случае замкнутые приводы создаются по одной из следующих структурных схем.
Электропривод с общим усилителем

Схема с общим усилителем представлена на рисунке справа в качестве примера, данная схема является схемой регулирования двух переменных двигателя, где Д — скорости тока I. Схема содержит в себе силовой преобразователь электроэнергии П, устройство управления УУ, механическую передачу МП и датчики тока ДТ, скорости ДС и устройство токоограничения (токовой отсечки) УТО. Данная схема обеспечивает хорошую характеристику двигателя. На интервале скорости 0 - С Oj за счёт действия обратной связи по току (сигнал U) обеспечивается ограничение тока и момента двигателя и характеристика имеет близкий к вертикальному участок. При скорости Со > 0 0j узел УТО заканчивает действие связи по току и за счёт наличия обратной связи по скорости (ОСС) (сигнал U ОСС ) характеристика двигателя становится жёстче ,что обеспечивает регулирование скорости.
Совокупность обратных связей, число которых может быть от двух и более, в схеме с единым усилителем образует своего рода модальный регулятор, а переменные при этом называются переменными состояния электропривода. Главной задачей модального регулятора можно считать обеспечение заданного качества динамических процессов в электроприводе — быстродействия, устойчивости и степени затухания переходных процессов. Это достигается выбором видов и соответствующим исследованием коэффициентов обратных связей по переменным электрического привода. Следует отметить, что система с суммирующим усилителем относится к системам управления с так называемой параллельной коррекцией.
Электропривод с наблюдающим устройством

В сложных системах электроприводов, имеющих, в частных случаях, разветвлённые кинематические цепи с упругими элементами, множество регулируемых переменных может оказаться весьма высоким. При данном факте измерение некоторых из них имеет некоторые затруднения по тем или иным причинам. В таких случаях прибегают к использованию так называемых наблюдающих устройств (наблюдателей).
Основную часть наблюдателя формируют совокупности моделей звеньев электрического привода, выполненных на основе операционных усилителей или элементов микропроцессорной техники. Выходные сигналы (напряжения) этих моделей, параметры которых соответствуют реально существующим звеньям электропривода, отображают близкие значения переменных.
Эксплуатация с применением наблюдателя на примере регулирования угла поворота вала двигателя поясняет структурная схема на рисунке 6, на которой приняты следующие обозначения: Д — двигатель, П — преобразователь, УУ — управляющее устройство, МП — механическая передача, НУ — наблюдающее устройство.
Электрический привод применяется для управления положением исполнительного органа φ ио . Это достигается соответствующим регулированием угла поворота φ вала двигателя, при котором необходимо также регулирование и других переменных — тока I, момента М и скорости двигателя.
Для применения рассматриваемого принципа управления, сигнал задания угла поворота ф з подаётся на устройство управления УУ и одновременно на вход наблюдающего устройства НУ. Наблюдающее устройство НУ вырабатывает с помощью моделей звеньев привода сигналы, пропорциональные току, моменту и скорости, и направляет их устройству управления УУ.
Так же следует отметить, что модели звеньев не в состоянии учесть всех реальных возмущений, воздействующих на электрический привод и электрическую машину, и нестабильности параметров ЭП, НУ выдаёт в управляющее устройство не точные выражения переменных, а их оценки, что обозначено на схеме звёздочкой «*».
Электропривод с подчинённой системой координат

Для увеличения точности получаемых оценок переменных состояния может применяться корректирующая обратная связь по управляемой переменной, показанная выше штриховой линией. В данном случае значение выходной управляемой переменной ф сравнивают при помощи обратной связи с её оценкой ф* и только затем в функции ошибки (выявленного отклонения) Дф корректируют показания отдельных моделей.
Структура с подчинённым управлением координат отличается тем, что в данной структуре регулирование каждой отдельной координаты осуществляется отдельными регуляторами — тока РТ и скорости PC, которые в свою очередь совместно с соответствующими обратными связями формируют замкнутые контуры. Они встраиваются таким образом, что входным, задающим сигналом для внутреннего контура тока U является выходной сигнал внешнего по отношению к нему контура скорости. Исходя из этого, внутренний контур тока зависит от внешнего контура скорости — основной управляемой координате электрического привода.
Главное достоинство схемы изображённой на рисунке заключается в возможности эффективной настройки управления каждой переменной как в статичном, так и в динамичном режимах, в силу чего она представляет собой в настоящее время основу применение в электроприводе. Кроме того, зависимость контура тока от контура скорости позволяет простыми методами осуществлять ограничение тока и момента, для чего достаточно ограничить на соответствующем уровне сигнал на выходе регулятора скорости (он же — сигнал задания тока)
Подбор электродвигателя
Качество работы современного электропривода во многом определяется правильным выбором используемого электрического двигателя , что в свою очередь обеспечивает продолжительную надёжную работу электропривода и высокую эффективность технологических и производственных процессов в промышленности, на транспорте, в строительстве и других областях.
При выборе электрического двигателя для привода производственного механизма руководствуются следующими рекомендациями:
- Исходя из технологических требований, производят выбор электрического двигателя по его техническим характеристикам (по роду тока, номинальным напряжению и мощности, частоте вращения, виду механической характеристики, продолжительности включения , перегрузочной способности, пусковым, регулировочным и тормозным свойствами др.), а также конструктивное исполнение двигателя по способу монтажа и крепления.
- Исходя из экономических соображений, выбирают наиболее простой, экономичный и надёжный в эксплуатации двигатель, не требующий высоких эксплуатационных расходов и имеющий наименьшие габариты, массу и стоимость.
- Исходя из условий окружающей среды, в которых будет работать двигатель, а также из требований безопасности работы во взрывоопасной среде, выбирают конструктивное исполнение двигателя по способу защиты .
Правильный выбор типа, исполнения и мощности электрического двигателя определяет не только безопасность, надёжность и экономичность работы и длительность срока службы двигателя, но и технико-экономические показатели всего электропривода в целом.
См. также
- Гидравлический привод
- Пневматический привод
- Комплектный безредукторный электропривод
- Мотор-редуктор
- Тиристорно-импульсная система управления
- Частотно-регулируемый привод
- Электрический двигатель
Примечания
- ↑ Ильинский Н. Ф. Основы электропривода: Учебное пособие для вузов. — 2-е изд., перераб. и доп. — М. : Издательство МЭИ, 2003. — С. 220. — ISBN 5-7046-0874-4 .
- Электроприводы. Термины и определения.-М.- Издательство стандартов. −1993 от 23 июня 2012 на Wayback Machine
- Онищенко Г.Б. Электрический привод. — М. : Академия, 2003.
- Анучин А.С. Системы управления электроприводов. — Москва: Издательский дом МЭИ, 2015. — 373 с. — ISBN 978-5-383-00918-5 .
Литература
- Соколовский Г. Г. Электроприводы переменного тока с частотным регулированием. — М. : «Академия», 2006. — ISBN 5-7695-2306-9 .
- Москаленко, В.В. Электрический привод. — 2-е изд. — М. : Академия, 2007. — ISBN 978-5-7695-2998-6 .
- Зимин Е. Н. и др. Электроприводы постоянного тока с вентильными преобразователями. Ленинград, Издательство «Энергоиздат», Ленинградское отделение, 1982
- Чиликин М. Г., Сандлер А. С. Общий курс электропривода. — 6-е изд. — М. : Энергоиздат, 1981. — 576 с.
- Тищенко О. Ф. Элементы приборных устройств. — М. : Высшая школа, 1982. — 263 с.
Ссылки
- .
- .
|
|
|
|---|---|
| В библиографических каталогах |
|
- 2020-08-12
- 2