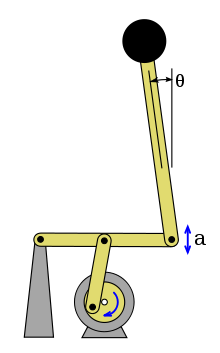
Одна из конструкций маятника Капицы: мотор приводит
кривошип
, который через
шатун
и
рычаг
передаёт вибрацию на перевёрнутый маятник.
Ма́ятником Капицы
называется система, состоящая из грузика, прикреплённого к лёгкой нерастяжимой спице, которая крепится к вибрирующему подвесу. Маятник носит имя академика и нобелевского лауреата
П. Л. Капицы
, построившего в 1951 году теорию для описания такой системы
. При неподвижной точке подвеса модель описывает обычный
математический маятник
, для которого имеются два положения равновесия: в нижней точке и в верхней точке. При этом равновесие математического маятника в верхней точке является
неустойчивым
, и любое сколь угодно малое возмущение приводит к потере равновесия.
Удивительной особенностью маятника Капицы является то, что, вопреки интуиции, перевёрнутое (вертикальное) положение маятника может быть устойчивым в случае быстрых вибраций подвеса. Хотя такое наблюдение было сделано еще в 1908 году А. Стефенсоном
, в течение длительного времени не имелось математического объяснения причин такой устойчивости. П. Л. Капица экспериментально исследовал такой маятник, а также построил теорию динамической стабилизации, разделяя движение на «быстрые» и «медленные» переменные и введя эффективный потенциал. Работа П. Л. Капицы, опубликованная в 1951 году
, открыла новое направление в физике — вибрационную механику. Метод П. Л. Капицы используется для описания колебательных процессов в
атомной физике
,
физике плазмы
,
кибернетической физике
. Эффективный потенциал, описывающий «медленную составляющую движения», описывается в томе «механика» курса теоретической физики
Л. Д. Ландау
.
Маятник Капицы интересен ещё и тем, что в такой простой системе можно наблюдать
параметрические резонансы
, когда нижнее положение равновесия не является больше устойчивым и амплитуда малых отклонений маятника нарастает со временем
. Также, при большой амплитуде вынуждающих колебаний в системе могут реализовываться хаотические режимы, когда в
сечении Пуанкаре
наблюдаются странные
аттракторы
.
Обозначения
Схема маятника Капицы
Направим ось
вертикально вверх, а ось
горизонтально, так чтобы плоское движение маятника происходило в плоскости (
—
). Введём обозначения:
В
кинетической энергии
помимо обычного слагаемого
, описывающего движение математического маятника, имеются дополнительные составляющие, вызванные вибрацией подвеса:
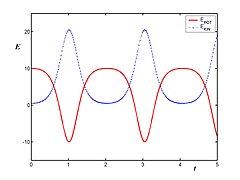
Для математического маятника полная энергия является сохраняющейся величиной, поэтому кинетическая энергия
и потенциальная энергия
на графике их зависимости от времени
симметричны относительно горизонтальной прямой. Из
теоремы вириала
следует, что средняя кинетическая и потенциальная энергии в гармоническом осцилляторе равны. Поэтому горизонтальная прямая, относительно которой имеется симметрия
и
, соответствует половине полной энергии.
Характерные зависимости потенциальной и кинетической энергий от времени для математического маятника
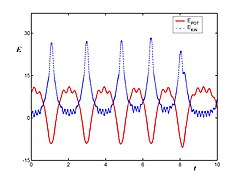
Если подвес колеблется, то полная энергия больше не сохраняется. Кинетическая энергия является более чувствительной к вынуждающим колебаниям, чем потенциальная. Потенциальная энергия
ограничена как сверху, так и снизу:
, в то время как кинетическая энергия ограничена только снизу:
. При больших значениях частоты
кинетическая энергия может быть много больше потенциальной.
Характерные зависимости потенциальной и кинетической энергий от времени для маятника Капицы
Уравнение движения
Движение маятника удовлетворяет
уравнениям Эйлера — Лагранжа
. Зависимость фазы маятника
от времени определяет положение грузика
:
Дифференциальное уравнение
описывающие эволюцию фазы маятника нелинейно из-за имеющегося в нём множителя
. Наличие нелинейного слагаемого может приводить к
хаотическому поведению
и появлению
странных аттракторов
.
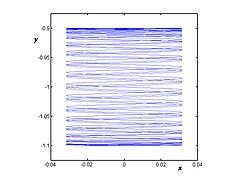
Положения равновесия
Колебания маятника Капицы в глобальном (нижнем) минимуме.
Модель маятника Капицы является более общей, чем модель математического маятника. Последняя получается в предельном случае
. Фазовый портрет математического маятника хорошо известен. На координатной плоскости это просто окружность
. Если в начальный момент времени энергия маятника была больше, чем максимум потенциальной энергии
, то траектория будет замкнутой и циклической. Если же энергия маятника была меньше
, то он будет совершать периодические колебания около единственной устойчивой точки равновесия с наименьшим значением потенциальной энергии
. В случае математического маятника полная энергии системы не меняется.
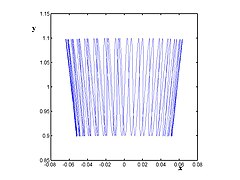
Колебания маятника Капицы в локальном (верхнем) минимуме.
В случае
система более не является замкнутой и её полная энергия может изменяться. Если при этом, частота вынуждающих колебаний
много больше частоты собственных колебаний
, то такой случай можно
проанализировать математически
. Оказывается
, что если ввести эффективный потенциал, в котором движется маятник (медленно относительно частоты
), то этот потенциал может иметь два локальных минимума — один, как и раньше в нижней точке
, а другой в верхней точке
. То есть точка
абсолютно неустойчивого равновесия для математического маятника, может оказаться точкой устойчивого равновесия для маятника Капицы.
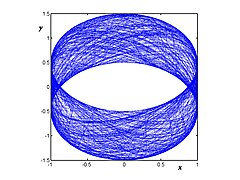
Фазовый портрет
Портрет системы в координатном пространстве для маятника Капицы при относительно небольшой амплитуде вынуждающих колебаний
Интересные фазовые портреты могут быть получены для значений параметров, недоступных для аналитического рассмотрения, например в случае большой амплитуды колебания подвеса
. Если увеличить амплитуду вынуждающих колебаний до половины длины маятника
, то получится картина аналогичная той, которая изображена на рисунке.
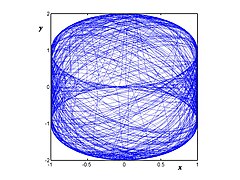
Портрет системы в координатном пространстве для маятника Капицы при большой амплитуде вынуждающих колебаний
При дальнейшем увеличении амплитуды
(начиная от значения
), всё внутреннее пространство начинает «замазываться» полностью, то есть, если ранее не все внутренние точки координатного пространства были доступны, то теперь система может побывать в любой точке. Очевидно, что дальнейшее увеличение длины
принципиально более не изменит картину.
Интересные факты
Как отмечал П. Л. Капица, маятниковые часы на вибрирующем основании всегда спешат.
В коридоре института физических проблем стояла работающая модель маятника Капицы, и любой желающий мог воочию убедиться, как при её включении маятник поднимался и оставался в вертикальном положении.
Метод эффективного потенциала был разработан П. Л. Капицей во время работы над высокочастотным генератором «ниготроном», названным так по месту исследования у себя на даче на Николиной Горе. Для того чтобы не было проблем с «секретностью» при публикации метода, П. Л. Капица придумывает простую физическую модель, к которой был бы применим этот метод. Таким образом, появляются статьи
про маятник с вибрирующим подвесом.
П. Л. Капица предлагал решить задачу в изменённом варианте поступающим к нему в аспирантуру. Требовалось отыскать условие устойчивости акробата на доске, положенной на цилиндр, лежащий на боку. Ожидаемый ответ был, что если акробат начинал быстро переступать ногами, то его положение становилось устойчивым.
При
ходьбе
устойчивость тела увеличивается в несколько раз по сравнению с устойчивостью при стоянии. Этот биомеханический феномен до настоящего времени не изучен. Существует гипотеза, которая объясняет устойчивость тела при ходьбе колебательными движениями центра голеностопного сустава. Тело человека представляется с позиции перевёрнутого маятника с центром в области голеностопных суставов, который приобретает устойчивость в вертикальном положении, если его центр совершает колебание вверх-вниз с достаточно высокой частотой (маятник Капицы).
Литература
↑ Капица П. Л. «Динамическая устойчивость маятника при колеблющейся точке подвеса» ЖЭТФ, т. 21, вып. 5. с. 588—597 (1951); Капица П. Л. «Маятник с вибрирующим подвесом», УФН, т. 44. Вып. 1. С. 7—20 (1951).
A. Stephenson «On an induced stability» Phil. Mag. 15, 233 (1908).
Ландау Л. Д., Лифшиц Е. М.
Механика. — Издание 5-е, стереотипное. —
М.
:
Физматлит
,
2004
. — 224 с. — («Теоретическая физика», том I). —
ISBN 5-9221-0055-6
.
Бутиков Е. И. «Маятник с осциллирующим подвесом (к 60-летию маятника Капицы)», от 12 июля 2014 на
Wayback Machine
.
Крайнов В. П. Избранные математические методы в теоретической физике. Издательство МФТИ (1996).
Астрахарчик Г.Е и Астрахарчик Н. А. «Исследование маятника Капицы» (G.E. Astrakharchik, N.A. Astrakharchik «Numerical study of Kapitza pendulum»)
Визуализация в реальном времени движений маятника Капицы доступна в интернете на сайтах
(неопр.)
.
Дата обращения: 8 апреля 2011.
1 октября 2011 года.
и от 2 мая 2011 на
Wayback Machine
Параметры маятника могут быть выбраны произвольно и вводятся вручную.
 вертикально вверх, а ось
вертикально вверх, а ось
 горизонтально, так чтобы плоское движение маятника происходило в плоскости (
горизонтально, так чтобы плоское движение маятника происходило в плоскости (
 —
—
 ). Введём обозначения:
). Введём обозначения:
 — частота вынуждающих вертикальных гармонических колебаний подвеса,
— частота вынуждающих вертикальных гармонических колебаний подвеса,
 — амплитуда вынуждающих колебаний,
— амплитуда вынуждающих колебаний,
 — собственная частота колебаний математического маятника,
— собственная частота колебаний математического маятника,
 — ускорение свободного падения,
— ускорение свободного падения,
 — длина лёгкого стержня,
— длина лёгкого стержня,
 — масса грузика.
— масса грузика.
 обозначить как
обозначить как
 , то зависимость координат грузика от времени запишется следующими формулами:
, то зависимость координат грузика от времени запишется следующими формулами:


 , описывающего движение математического маятника, имеются дополнительные составляющие, вызванные вибрацией подвеса:
, описывающего движение математического маятника, имеются дополнительные составляющие, вызванные вибрацией подвеса:

 , а
, а
 .
.
 и потенциальная энергия
и потенциальная энергия
 на графике их зависимости от времени
на графике их зависимости от времени
 симметричны относительно горизонтальной прямой. Из
симметричны относительно горизонтальной прямой. Из
 и
и
 , соответствует половине полной энергии.
, соответствует половине полной энергии.
 ограничена как сверху, так и снизу:
ограничена как сверху, так и снизу:
 , в то время как кинетическая энергия ограничена только снизу:
, в то время как кинетическая энергия ограничена только снизу:
 . При больших значениях частоты
. При больших значениях частоты
 кинетическая энергия может быть много больше потенциальной.
кинетическая энергия может быть много больше потенциальной.
 от времени определяет положение грузика
:
от времени определяет положение грузика
:


 . Наличие нелинейного слагаемого может приводить к
. Наличие нелинейного слагаемого может приводить к
 . Фазовый портрет математического маятника хорошо известен. На координатной плоскости это просто окружность
. Фазовый портрет математического маятника хорошо известен. На координатной плоскости это просто окружность
 . Если в начальный момент времени энергия маятника была больше, чем максимум потенциальной энергии
. Если в начальный момент времени энергия маятника была больше, чем максимум потенциальной энергии
 , то траектория будет замкнутой и циклической. Если же энергия маятника была меньше
, то траектория будет замкнутой и циклической. Если же энергия маятника была меньше
 , то он будет совершать периодические колебания около единственной устойчивой точки равновесия с наименьшим значением потенциальной энергии
, то он будет совершать периодические колебания около единственной устойчивой точки равновесия с наименьшим значением потенциальной энергии
 . В случае математического маятника полная энергии системы не меняется.
. В случае математического маятника полная энергии системы не меняется.
 система более не является замкнутой и её полная энергия может изменяться. Если при этом, частота вынуждающих колебаний
система более не является замкнутой и её полная энергия может изменяться. Если при этом, частота вынуждающих колебаний
 много больше частоты собственных колебаний
много больше частоты собственных колебаний
 , то такой случай можно
, то такой случай можно
 ), то этот потенциал может иметь два локальных минимума — один, как и раньше в нижней точке
), то этот потенциал может иметь два локальных минимума — один, как и раньше в нижней точке
 , а другой в верхней точке
, а другой в верхней точке
 . То есть точка
. То есть точка
 абсолютно неустойчивого равновесия для математического маятника, может оказаться точкой устойчивого равновесия для маятника Капицы.
абсолютно неустойчивого равновесия для математического маятника, может оказаться точкой устойчивого равновесия для маятника Капицы.
 . Если увеличить амплитуду вынуждающих колебаний до половины длины маятника
. Если увеличить амплитуду вынуждающих колебаний до половины длины маятника
 , то получится картина аналогичная той, которая изображена на рисунке.
, то получится картина аналогичная той, которая изображена на рисунке.
 (начиная от значения
(начиная от значения
 ), всё внутреннее пространство начинает «замазываться» полностью, то есть, если ранее не все внутренние точки координатного пространства были доступны, то теперь система может побывать в любой точке. Очевидно, что дальнейшее увеличение длины
), всё внутреннее пространство начинает «замазываться» полностью, то есть, если ранее не все внутренние точки координатного пространства были доступны, то теперь система может побывать в любой точке. Очевидно, что дальнейшее увеличение длины
 принципиально более не изменит картину.
принципиально более не изменит картину.