Взрыв нефтяной платформы Deepwater Horizon
- 1 year ago
- 0
- 0

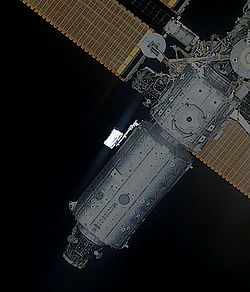
Вне́шние складски́е платфо́рмы ( англ. External Storage Platforms - ESP ) — три негерметичных компонента Международной космической станции , предназначенные для наружного хранения крупногабаритных грузов. Основное назначение: хранение доставляемых на МКС грузов, различных элементов и запасных частей, имеющих аббревиатуру ORU (от англ. Orbital Replacement Units). ORU хранятся на платформах до тех пор, пока не потребуется их перенос на штатные места, или на места, взамен вышедшего из строя оборудования. Они крепятся к платформам с помощью специальных такелажных устройств крепления ( англ. Flight Releasable Attachment Mechanisms - FRAM ), первоначально разработанных для Шаттлов . Устройства крепления производятся компанией « Спейсхэб » ( англ. Spacehab) . Некоторое хранимое оборудование требует электропитания, поэтому к платформам подведено электричество.
Первая платформа была установлена на корпусе модуля «Дестини» 13 марта 2001 года , во время второго выхода в открытый космос экипажа Шаттла Дискавери «STS-102» . Питание подаётся от модуля «Юнити» . Платформа имеет два FRAM , на которых постоянно закреплены:

Вторая платформа была установлена 3 августа 2005 года , на модуль «Квест» , с помощью Шаттла Дискавери «STS-114» и двух членов экипажа корабля, во время их третьего выхода в открытый космос. Крепёж платформы к модулю осуществлён с помощью специального крепёжного приспособления ( англ. ESP Attachment Device - ESPAD ). Масса платформы составляет 2676 кг. Масса хранимого ORU — 3400 кг. Также как и у ESP-1, питание осуществляется от модуля «Юнити» .
Платформа имеет восемь FRAM , на которых закреплены:

Третья платформа была установлена 14 августа 2007 года , в течение седьмого дня экспедиции Индевор «STS-118» . ESP-3 была первой платформой, которую установили, используя только робототехнические возможности шаттлов и МКС. Были задействованы, соответственно: внешняя видеосистема причаливания ( англ. External Berthing Camera System - BCS ) и фотоэлектрический дистанционный манипулятор ( англ. Photovoltaic Radiator Grapple Fixture - PVRGF ), на котором были установлены четыре видеокамеры, видеоинформация с которых поступала на станцию.

Платформа установлена на один из сегментов ферменной конструкции P3 .
В отличие от других платформ, на ESP-3 присутствуют направляющие поручни, места для крепления страховочных тросов и ограничители для ног космонавтов, с помощью которых облегчается доступ к расположенному на платформе оборудованию.
На восьми имеющихся FRAM могут быть установлены до семи вспомогательных элементов и запасных частей МКС. С октября 2007 года, на платформе закреплены:
Кроме этого, экипажем Индевор «STS-118» был установлен запасной гиродин CMG-3 (от англ. Control Moment Gyroscope) и его несущая конструкция. Но 14 августа 2007 года экипажем Атлантис «STS-122» он был демонтирован и установлен на ферму Z1 , взамен сломанного; несущая конструкция перенесена на платформу ESP-2.