Наноробот
- 1 year ago
- 0
- 0

Наноро́боты , или нанобо́ты , — роботы , размером сопоставимые с молекулой (менее 100 нм ), обладающие функциями движения, обработки и передачи информации , исполнения программ.
Нанороботы, способные к созданию своих копий, то есть самовоспроизводству , называются репликаторами . Такие наномашины обоснованы в известном выступлении Ричарда Фейнмана «Внизу полным-полно места» 1959 года. В 1986 году Эрик Дрекслер , рассматривая возможности их создания в книге « Машины создания: Грядущая эра нанотехнологии », ввёл термин «наноробот».
Другие определения описывают наноробота как машину, способную точно взаимодействовать с наноразмерными объектами или способной манипулировать объектами в наномасштабе. Вследствие этого, даже крупные аппараты, такие как атомно-силовой микроскоп можно считать нанороботами, так как он производит манипуляции объектами на наноуровне. Кроме того, даже обычных роботов, которые могут перемещаться с наноразмерной точностью, можно считать нанороботами.
Кроме слова «наноробот» также используют выражения «нанит» и «наноген», однако, технически правильным термином в контексте серьёзных инженерных исследований все равно остается первый вариант.
Так как нанороботы имеют микроскопические размеры, то их, вероятно, потребуется очень много для совместной работы в решении микроскопических и макроскопических задач. Рассматривают стаи нанороботов, которые не способны к репликации (т. н. « утилитарный туман ») и которые способны к самостоятельной репликации в окружающей среде (« серая слизь » и др. варианты).
Некоторые сторонники нанороботов в ответ на сценарий « серой слизи » высказывают мнение о том, что нанороботы способны к репликации только в ограниченном количестве и в определённом пространстве нанозавода. Кроме того, ещё только предстоит разработать процесс саморепликации, который сделает данную нанотехнологию безопасной. Кроме того, свободная саморепликация роботов является гипотетическим процессом и даже не рассматривается в текущих планах научных исследований.
Однако, имеются планы по созданию медицинских нанороботов , которые будут впрыскиваться в пациента и выполнять роль беспроводной связи на наноуровне. Такие нанороботы не могут быть получены в ходе самостоятельного копирования, так как это вероятно приведет к появлению ошибок при копировании, которые могут снизить надежность наноустройства и изменить выполнение медицинских задач. Вместо этого нанороботов планируется изготавливать на специализированных медицинских .
В связи с развитием направления научных исследований нанороботов, сейчас наиболее остро стоят вопросы их конкретного проектирования. Одной из инициатив по решению этой проблемы является «Сотрудничество по разработке нанофабрик» , основанное Робертом Фрайтасом и Ральфом Меркле в 2000 году , деятельность которого сосредоточена на разработке практической программы исследований , которая направлена на создание контролируемой алмазной механосинтетической нанофабрики, которая будет способна к производству медицинских нанороботов на основе алмазных соединений.
Для этого разрабатываются технологии зондирования, управления силовыми связями между молекулами и навигации. Создаются проекты и прототипы инструментария для манипуляций, двигательного аппарата ( молекулярные моторы ) и «бортового компьютера».

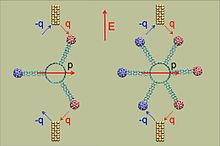
Молекулярные двигатели — наноразмерные машины, способные осуществлять вращение при приложении к ним энергии. Главной особенностью молекулярных моторов являются повторяющиеся однонаправленные вращательные движения происходящие при подаче энергии. Для подачи энергии используются химический, световой метод, а также метод туннелирования электронов.
Кроме молекулярных двигателей, создаются также наноэлектродвигатели, сходные по конструкции с макроскопическими аналогами , проектируются двигатели, принцип работы которых основывается на использовании квантовых эффектов . Также создаются нанодвигатели, работающие на воде .
Наномобилем называется простейший наноробот, состоящий из одной или нескольких молекул , способный самостоятельно передвигаться. [ уточнить ] Источником энергии служит подаваемый извне электрический ток . Первые в истории гонки наномобилей прошли в 2017 году .
3D-печать это метод послойного создания физического объекта по цифровой 3D-модели. 3D-печать в наномасштабе по сути является тем же самым, но в намного меньшем масштабе. Для того чтобы напечатать структуру в масштабе 5-400 микрометров, точность сегодняшних 3D-принтеров должна быть значительно улучшена.
Методика впервые разработанная в Сеуле, Южная Корея, использует двухэтапный процесс 3D-печати: собственно 3D-печать и лазерную гравировку пластин. Для большей точности на наноуровне в процессе 3D-печати используется машина лазерной гравировки. Эта методика имеет много преимуществ. Во-первых, это повышает общую точность процесса печати. Во-вторых, методика позволяет потенциально создавать сегменты наноробота.
3D-принтер использует жидкую смолу, которая затвердевает в точно правильных местах с помощью сфокусированного лазерного луча. Фокальная точка лазерного луча направляется через смолу с помощью подвижных зеркал и оставляет линию твердого полимера всего несколько сотен нанометров в ширину. Это разрешение позволяет создавать скульптуры размером с песчинку. Эта методика достаточно быстрая по меркам 3D-нанопечати.
Первое полезное применение наномашин, если они появятся, планируется в медицинских технологиях, где они могут быть использованы для выявления и уничтожения раковых клеток. Также они могут обнаруживать токсичные химические вещества в окружающей среде и измерять уровень их концентрации.
По состоянию на 2016 год нанороботы находятся в научно-исследовательской стадии создания. Некоторыми учёными утверждается, что уже созданы некоторые компоненты нанороботов . Разработке компонентов наноустройств и непосредственно нанороботам посвящён ряд международных научных конференций .
Уже созданы некоторые примитивные прототипы молекулярных машин. Например, датчик, имеющий переключатель около 1,5 нм, способный вести подсчёт отдельных молекул в химических образцах . Недавно Университет Райса продемонстрировал наноустройства для использования их в регулировании химических процессов в современных автомобилях.
Одним из самых сложных прототипов наноробота является «DNA box», созданный в конце 2008 года международной группой под руководством Йоргена Кьемса . Устройство имеет подвижную часть, управляемую с помощью добавления в среду специфических фрагментов ДНК . По мнению Кьемса, устройство может работать как « ДНК-компьютер », так как на его базе возможна реализация логических вентилей . Важной особенностью устройства является метод его сборки, так называемый , благодаря которому устройство собирается в автоматическом режиме.
В 2010 году были впервые продемонстрированы нанороботы на основе ДНК, способные перемещаться в пространстве .
Летом 2016 года учёным из Дрексельского университета удалось создать нанороботов для скорейшей доставки лекарств по венам. При помощи электромагнитного поля специалисты смогли развить высокую скорость у мельчайших роботов. Новая разработка облегчит отправку лекарственных средств по кровеносным сосудам организма. Свои выводы и детали изобретения были отражены в статье издания Scientific Reports. Электромагнитное поле воздействует на роботов, заставляя их вращаться. Соединённые в цепочку 13 нанороботов способны развивать скорость до 17,85 микрометра в секунду. Учёные в ходе наблюдений выявили особенность, которая выражалась в способности разделяться на более мелкие цепочки при достижении максимальной скорости. Нанороботов можно даже направить в различные стороны при изменении направления магнитного поля .
