Графический интерфейс пользователя
- 1 year ago
- 0
- 0
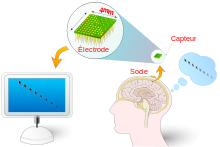

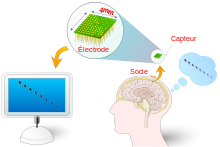
Нейрокомпьютерный интерфейс (НКИ) (называемый также прямой нейронный интерфейс , мозговой интерфейс , интерфейс «мозг — компьютер» ) — система, созданная для обмена информацией между мозгом и электронным устройством (например, компьютером ). В однонаправленных интерфейсах внешние устройства могут либо принимать сигналы от мозга, либо посылать ему сигналы (например, имитируя сетчатку глаза при восстановлении зрения электронным имплантатом). Двунаправленные интерфейсы позволяют мозгу и внешним устройствам обмениваться информацией в обоих направлениях. В основе нейрокомпьютерного интерфейса часто используется метод биологической обратной связи .
Возможность симбиоза человека и компьютера рассматривалась ещё в 1960 году исследователем агентства DARPA , считавшим, что первое время расширенный интеллект будет превосходить полностью искусственный .
Изучение оснований, на которых базируется нейро-компьютерный интерфейс, уходит корнями в учение И. П. Павлова об условных рефлексах и регулирующей роли коры. Развивая эти идеи, П. К. Анохин с 1935 года показал, что принципу обратной связи принадлежит решающая роль в регулировании как высших приспособительных реакций человека, так и его внутренней среды. Существуют работы Н. П. Бехтеревой с 1968 по 2008 гг. по расшифровке мозговых кодов психической деятельности, продолжающиеся до настоящего времени её последователями, в том числе, с позиций нейрокибернетики и офтальмонейрокибернетики.
Исследования нейро-компьютерного интерфейса начались в 1970 -х годах в Калифорнийском университете в Лос-Анджелесе ( UCLA ). После многолетних экспериментов на животных в середине девяностых годов в организм человека были имплантированы первые устройства, способные передавать биологическую информацию от тела человека к компьютеру. С помощью этих устройств удалось восстановить поврежденные функции слуха, зрения, а также утраченные двигательные навыки. В основе успешной работы НКИ лежит способность коры больших полушарий к адаптации (свойство пластичности), благодаря которому имплантированное устройство может служить источником биологической информации.
В нейрохирургическом центре в Кливленде в 2004 году был создан первый искусственный кремниевый чип — аналог гиппокампа , который в свою очередь был разработан в университете Южной Калифорнии в 2003 году . Кремний обладает возможностью соединять неживую материю с живыми нейронами, а окруженные нейронами транзисторы получают сигналы от нервных клеток, одновременно конденсаторы отсылают к ним сигналы. Каждый транзистор на чипе улавливает малейшее, едва заметное изменение электрического заряда, которое происходит при «выстреле» нейрона в процессе передачи ионов натрия.
Новая микросхема способна получать импульсы от 16 тысяч мозговых нейронов биологического происхождения и посылать обратно сигналы к нескольким сотням клеток. Так как при производстве чипа нейроны были выделены из окружающих их глиальных клеток, то пришлось добавить белки, которые «склеивают» нейроны в мозге, также образуя дополнительные натриевые каналы. Увеличение числа натриевых каналов повышает шансы на то, что транспорт ионов преобразуется в электрические сигналы в чипе.
Нейропротезирование — область неврологии, занимающаяся созданием и имплантацией искусственных устройств для восстановления нарушенных функций нервной системы или сенсорных органов ( нейропротезов или нейроимплантов). Наиболее часто используется кохлеарный нейроимплантат , которым пользуется около 100 000 человек по всему миру (по данным на 2006 год). Существуют также нейропротезы для восстановления зрения, например, имплантанты сетчатки. Бионическая система зрения Gennaris, благодаря , обходит поврежденные зрительные нервы, позволяя передавать сигналы к зрительному центру мозга.
Основное отличие НКИ от нейропротезирования заключается в особенностях их применения: нейропротезы чаще всего «подключают» нервную систему к имплантированному устройству, в то время как НКИ обычно соединяет мозг (или нервную систему) с компьютерной системой. На практике нейропротез может быть подсоединен к любой части нервной системы, например, к периферическим нервам, в то время как НКИ представляет собой более узкий класс систем, взаимодействующих с центральной нервной системой. Термины нейропротезирование и НКИ могут быть взаимозаменяемыми, поскольку оба подхода преследуют одну цель — восстановление зрения, слуха, двигательных способностей, способности общаться и других когнитивных функций. Кроме того, в обоих подходах используются аналогичные экспериментальные методы, включая хирургическое вмешательство.
Нескольким лабораториям удалось записать сигналы от коры головного мозга обезьяны и крысы для управления НКИ при движении. Обезьяны управляли курсором на экране компьютера и давали команды на выполнения простейших действий роботам, имитирующим руку, мысленно и без каких-либо движений. Другие исследования с участием кошек были посвящены расшифровке визуальных сигналов.
Исследования, в результате которых были разработаны алгоритмы для реконструкции движений из сигналов нейронов моторной зоны коры головного мозга, которые контролируют двигательные функции, датируются 1970 -ми годами. Исследовательские группы, возглавлявшиеся Шмидтом, Фетзом и Бейкером в 1970 -х установили, что обезьяны могут быстро обучаться избирательно контролировать скорость реакции отдельных нейронов в первичной двигательной коре головного мозга используя замкнутое позиционирование операций, обучающий метод наказания и наград.
В 1980 -х Апостолос Георгопоулос из Университета Хопкинса обнаружил математическую зависимость между электрическими ответами отдельных нейронов коры головного мозга у макак резус и направлением, в котором макаки двигали свои конечности (на основе функции косинуса ). Он также обнаружил, что разные группы нейронов в различных областях головного мозга совместно контролировали двигательные команды, но были способны регистрировать электрические сигналы от возбужденных нейронов только в одной области одновременно из-за технических ограничений, налагаемых его оборудованием.
С середины 1990-х годов началось быстрое развитие НКИ. Нескольким группам ученых удалось зафиксировать сигналы двигательного центра мозга используя записи сигналов от групп нейронов, а также использовать эти сигналы для управления внешними устройствами. Среди них можно назвать группы, возглавлявшиеся Ричардом Андерсеном, Джоном Донахью, Филиппом Кеннеди, Мигелем Николелисом , Эндрю Шварцом.
Экзоко́ртекс ( др.-греч. ἔξω [exō] — вне, снаружи; лат. cortex — кора) — внешняя система обработки информации, которая поможет усилить интеллект или выступить нейропротезом для коры головного мозга . Если термин «экзокортекс» понимать расширенно, то можно сказать, что его функции уже выполняются Интернетом , смартфонами , различными гаджетами и что его история началась с изобретения письменности .
Возможность симбиоза человека и компьютера рассматривалась ещё в 1960 году исследователем агентства DARPA , считавшим, что первое время расширенный интеллект будет превосходить полностью искусственный .
К появлению экзокортекса может привести развитие биоинженерии : интерфейса мозг-компьютер, устройств для восстановления функций нервов и рецепторов; нейробиологии : нейроморфных процессоров ; вычислительной нейробиологии : программное обеспечение, эмулирующее психические процессы .
Людей с вживлёнными подобными устройствами можно будет называть киборгами или постлюдьми . На рынок готовятся выйти модуляторы настроения, основанные на принципах электростимуляции , однако в отсутствие обратной связи их можно рассматривать лишь как устройства для ТЭС-терапии .
В качестве экзокортекса может быть использован мозг другого человека . Финские исследователи считают, что экзокортекс может дать возможность не только для загрузки сознания человека в компьютер, но и для объединения сознания нескольких человеческих организмов .
Первый в истории НКИ был создан Филлипом Кеннеди и его коллегами с использованием электродов, имплантированных в кору головного мозга обезьян. В 1999 году исследователи под руководством Яна Дэна из Университета Калифорнии расшифровали сигналы нейронов зрительной системы кошки и использовали эти данные для воспроизведения изображений, воспринимаемых подопытными животными. В этих экспериментах были использованы электроды, вживленные в таламус (структура среднего мозга , передающая в кору сенсорные сигналы от всех органов чувств). С их помощью было исследовано 177 клеток в латеральном коленчатом теле в таламусе и расшифрованы сигналы, приходящие от сетчатки. Кошкам демонстрировали восемь коротких фильмов, в течение которых проводили запись активности нейронов. Используя математические фильтры, исследователи расшифровали сигналы для воспроизведения образов, которые видели кошки и были способны воспроизвести узнаваемые сцены и двигающиеся объекты. Схожие результаты на человеке были получены исследователями из Японии.
Для повышения эффективности управления НКИ Мигель Николесис предложил регистрировать электрическую активность одновременно с помощью нескольких электродов, вживленных в удаленные области головного мозга. За первыми исследованиями на крысах, которые в девяностых годах проводили Николелис и его коллеги, последовали аналогичные эксперименты на обезьянах. В результате был создан НКИ, с помощью которого сигналы нервных клеток обезьян были расшифрованы и использованы для управления движениями робота. Именно обезьяны оказались идеальными испытуемыми для такого рода работ, поскольку у них хорошо развиты двигательные и манипуляционные навыки, и, соответственно, высоко развиты структуры головного мозга, отвечающие за реализацию моторных функций. К 2000 году группа Николелиса создала НКИ, который воспроизводил движения передних конечностей обезьян во время манипуляций джойстиком или во время захвата пищи. Данная система работала в режиме реального времени и была использована для дистанционного управления движениями робота посредством интернет-связи. При этом обезьяна не имела возможности увидеть движения собственных конечностей и не получила какой-либо другой информации для обратной связи.
Позднее группа Николесиса использовала результаты экспериментов с макаками-резус для создания алгоритма движения робота, имитирующего движения руки человека. Для управления движениями робота использовали информацию, полученную при записи нейронной активности обезьян после декодирования. Обезьяны были обучены указывать на объекты на экране компьютера, манипулируя джойстиком. Движения конечности обезьян-операторов были воспроизведены движениями робота.
В России с 2009 года действует проект NeuroG , целью которого является создание универсальных алгоритмов для распознавания зрительных образов человеком. 25 апреля 2011 года в Политехническом музее Москвы проектом NeuroG была проведена первая в мире демонстрация эксперимента по распознаванию воображаемых образов.
9 июля 2015 года российская « Объединённая приборостроительная корпорация » приступила к испытаниям неинвазивного нейроинтерфейса «мозг-компьютер», позволяющего силой мысли управлять биологическими роботизированными экзопротезами. На данный момент нейроинтерфейс проходит испытания. После их завершения будет принято решение о серийном выпуске роботизированных экзопротезов. По заявлению пресс-службы, ориентировочно серийный выпуск протезов должен был быть начат в 2016 году .
Обратная связь в протезах рук реализовывается разными способами: инвазивными методами, имплантированными нейронными интерфейсами, а также вибро- или механо- тактильной обратной связью . В 2019 году был испытан двойной протез рук с обратной связью на основе имплантированных в мозг пациента внутрикорковых датчиков.