Interested Article - Слепая деконволюция

- 2020-10-20
- 1
Слепая деконволюция — метод восстановления изображения без априорной информации о функции размытия точки оптической системы , которая вносит в регистрируемый полезный сигнал шум, искажения и т. п.
История
Классические методы восстановления изображений ведут свою историю с 60-х годов XX века, когда остро встала новая по тем временам проблематика исследования космоса. Примерно в середине 70-х годов появились ранние алгоритмы, которые напрямую задействовали идеи слепой деконволюции пытаясь оценить известные закономерности размывания изображений. Затем небольшой, но целеустремлённый всплеск работ последовал в поздние 80-е годы, и наконец полноценное возрождение научного интереса произошло в 90-х годах, когда эта область интенсивно разрабатывалась сообществами физиков-оптиков, астрономов и специалистов по обработке изображений . Появившиеся в результате их усилий идеи базируются на методах линейной алгебры , численного анализа и статистической теории оценивания .
В настоящее время алгоритмы, основанные на слепой деконволюции, используются в ряде прикладных и технических дисциплин, таких как, например: астрономические наблюдения , , микроскопия , биомедицинская оптика, проблематика сверхразрешения и отслеживания движущихся целей .
Характер проблемы
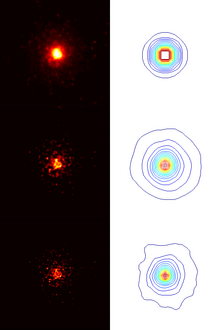
Выделяют два основных фактора, отрицательно влияющих на качество полученного изображения в ходе его формирования на датчиках регистрирующего прибора. Первым является размазанность картинки (или её фрагментов), которая проявляет себя в виде потери чёткости. Она может возникнуть вследствие несовершенства оптической системы, неправильной фокусировки поступающего сигнала или взаимном смещении камеры относительно объекта съёмки. Кроме этого, к аналогичному эффекту могут привести турбулентные свойства атмосферного канала, по которому распространяется сигнал. В некоторых типах регистрирующей аппаратуры высокого разрешения (телескопах, микроскопах и т. п.) это явление присутствует на уровне дифракционного предела . С математической точки зрения смазанность нередко рассматривается как результат низкочастотной фильтрации исходного массива данных .
Вторым существенным фактором является неизбежное присутствие разного рода шумов, которые накладываются на полезную компоненту сигнала в процессе квантования и записи информации. Причины появления шумовых искажений могут быть самыми разнообразными: случайные флуктуации количества фотонов в точках их регистрации, тепловой шум сенсоров, гранулярный шум при использовании лазерного источника света, искажения при оцифровке сигнала и т. п.
Постановка задачи
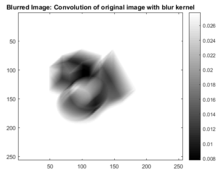
В классическом примере линейной системы математическая модель искажения поступающего полезного сигнала , как правило, задаётся следующим образом :
 , как правило, задаётся следующим образом
:
, как правило, задаётся следующим образом
:
,
 ,
,
где:
- — векторная переменная пространственных координат,
- — функция размытия точки,
- — аддитивный шумовой процесс,
- — наблюдаемый сигнал, представляющий из себя результат наложения шума и внесения искажений.
 — векторная переменная пространственных координат,
— векторная переменная пространственных координат,
 — функция размытия точки,
— функция размытия точки,
 — аддитивный шумовой процесс,
— аддитивный шумовой процесс,
 — наблюдаемый сигнал, представляющий из себя результат наложения шума и внесения искажений.
— наблюдаемый сигнал, представляющий из себя результат наложения шума и внесения искажений.
В рамках этих предположений конечной целью становится построение адекватной оценки для функций и опираясь на вид зарегистрированного сигнала . При этом, в большинстве прикладных задач в роли шумовой компоненты обычно выступает белый гауссовский шум , некоррелированный с исследуемым сигналом. Нередко для представления этой задачи используется матричная форма записи .
 и
и
 опираясь на вид зарегистрированного сигнала
опираясь на вид зарегистрированного сигнала
 . При этом, в большинстве прикладных задач в роли шумовой компоненты
. При этом, в большинстве прикладных задач в роли шумовой компоненты
 обычно выступает
обычно выступает
Вообще говоря, слепая деконволюция является , зависимость её решения от входных параметров уравнения совсем не обязательно должна обладать свойством непрерывности , найденное решение может быть не единственным и совсем не обязательно обязано существовать . Дополнительные сложности накладываются при использовании инструментария из области Фурье-анализа и при поиске решения обратной задачи в спектральной плоскости, так как, не смотря на то, что множества положительных и финитных функций обладают свойством выпуклости , множество Фурье-образов от произведения функций выпуклым не является .
Основные подходы к поиску решения
Выделяют два разных подхода к восстановлению исходной структуры искажённого изображения, которые, в свою очередь, произвели на свет два класса практических способов нахождения решения. Первый из них связан с априорной оценкой функции размытия точки , второй — с совместным построением оценок для функции размытия точки и для искомой функции .
 , второй — с совместным построением оценок для функции размытия точки и для искомой функции
, второй — с совместным построением оценок для функции размытия точки и для искомой функции
 .
.
В первой группе методов используется построение функции размытия точки исходя из информации о рассеивающих свойствах передаточной системы, которая доступна априори (экспериментально или исходя из какого-либо рода общих соображений). В дальнейшем полученную оценку для возможно параметризовать и пустить в дело в связке с классическими алгоритмами восстановления изображений на базе теоремы Байеса и метода максимального правдоподобия .
 исходя из информации о рассеивающих свойствах передаточной системы, которая доступна априори (экспериментально или исходя из какого-либо рода общих соображений). В дальнейшем полученную оценку для
исходя из информации о рассеивающих свойствах передаточной системы, которая доступна априори (экспериментально или исходя из какого-либо рода общих соображений). В дальнейшем полученную оценку для
 возможно параметризовать и пустить в дело в связке с классическими алгоритмами восстановления изображений на базе
возможно параметризовать и пустить в дело в связке с классическими алгоритмами восстановления изображений на базе
Во втором подходе осуществляется совместная оценка функции размытия точки и искомого изображения, где априорная информация о свойствах изображения и передаточного канала объединяется в виде моделей, параметры которых оцениваются из имеющихся данных. Затем эти модели используются в расчётных схемах, которые чаще всего, строятся индивидуально для и .
 и
и
 .
.
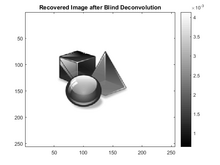
В рамках обоих подходов широко применяются итеративные процедуры, когда, например, сначала вычисляется функция размытия точки, затем по полученной информации улучшается оценка изображения , затем проводится регуляризация решения (обнуление отрицательных значений в пространственной плоскости и т. п.), по полученным данным корректируется функция размытия точки, на её основе вычисляется новая оценка функции , она опять стабилизируется и т. д. пока, после некоторого конечного числа итераций, не получается подобраться к удовлетворительному решению. Однако, критерии надёжной сходимости таких схем всё ещё остаются актуальной и весьма остро стоящей перед научным сообществом проблемой .
 , затем проводится
, затем проводится
 , она опять стабилизируется и т. д. пока, после некоторого конечного числа итераций, не получается подобраться к удовлетворительному решению. Однако, критерии надёжной сходимости таких схем всё ещё остаются актуальной и весьма остро стоящей перед научным сообществом проблемой
.
, она опять стабилизируется и т. д. пока, после некоторого конечного числа итераций, не получается подобраться к удовлетворительному решению. Однако, критерии надёжной сходимости таких схем всё ещё остаются актуальной и весьма остро стоящей перед научным сообществом проблемой
.
Примечания
- , Introduction, p. 2.
- , Introduction, p. 3.
- , Image Degradation, с. 1-3.
- , Image Degradation, с. 3-4.
- ↑ , Mathematical Problem Formulation, p. 4.
- ↑ , Метод слепой деконволюции и его обобщение, с. 222—223.
- ↑ , Classification of Blind Image Deconvolution Methodologies, p. 5.
- , Classification of Blind Image Deconvolution Methodologies, p. 6.
- , Метод совместной деконволюции, с. 223.
Использованные источники
- А. А. Потапов, Ю. В. Гуляев, С. А. Никитов, А. А. Пахомов, В. А. Герман. Новейшие методы обработки изображений / А. А. Потапов. — М. : «Физматлит», 2008. — 496 с. — ISBN 978-5-9221-0841-6 .
- S. Chaudhuri et al. Blind Image Deconvolution: Methods and Convergence. — Springer, 2014. — 151 p. — (Computers). — ISBN 978-3-319-10484-3 . — doi : .
- T. E. Bishop et al. Blind Image Deconvolution: Problem Formulation and Existing Approaches // Blind Image Deconvolution: Theory and Applications / P. Campi, K. Egiazaria. — Boca Raton, London, New York: CRC Press, 2007. — ISBN 978-1-4200-0729-9 .
- 2020-10-20
- 1









