Гармонический Мир
- 1 year ago
- 0
- 0

Гармони́ческий осцилля́тор (в классической механике ) — система , которая при выведении её из положения равновесия испытывает действие возвращающей силы F , пропорциональной смещению x :
где k — постоянный коэффициент.
Если F — единственная сила, действующая на систему, то систему называют простым или консервативным гармоническим осциллятором . Свободные колебания такой системы представляют собой периодическое движение около положения равновесия (гармонические колебания). Частота и амплитуда при этом постоянны, причём частота не зависит от амплитуды.
Если имеется ещё и сила трения ( затухание ), пропорциональная скорости движения ( вязкое трение ), то такую систему называют затухающим или диссипативным осциллятором . Если трение не слишком велико, то система совершает почти периодическое движение — синусоидальные колебания с постоянной частотой и экспоненциально убывающей амплитудой. Частота свободных колебаний затухающего осциллятора оказывается несколько ниже, чем у аналогичного осциллятора без трения.
Если осциллятор предоставлен сам себе, то говорят, что он совершает свободные колебания . Если же присутствует внешняя сила (зависящая от времени), то говорят, что осциллятор испытывает вынужденные колебания .
Механическими примерами гармонического осциллятора являются математический маятник (с малыми углами отклонения), , торсионный маятник и акустические системы. Среди немеханических аналогов гармонического осциллятора можно выделить электрический гармонический осциллятор (см. LC-цепь ).
Пусть x — смещение материальной точки с массой относительно её положения равновесия, а F — действующая на точку возвращающая сила любой природы вида:
Тогда, используя второй закон Ньютона , можно записать ускорение как:
Обозначая и обозначая a (вторую производную от координаты по времени) как , имеем:
Это дифференциальное уравнение описывает поведение консервативного гармонического осциллятора. Величину называют угловой частотой . ( Угловая частота измеряется в радианах за секунду. Чтобы перейти к частоте, выражающейся в герцах надо разделить значение угловой частоты на так как
Будем искать решение этого уравнения в виде :
Оба варианта верны, поскольку известно общее тождество cos θ = sin(π/2 — θ) . Используя тригонометрические соотношения , можно записать:
и, таким образом,
также является верным решением при соответствующим образом выбранных постоянных a и b .
Подставляем решения в дифференциальное уравнение получаем:
Амплитуда сокращается. Значит, она может иметь любое значение (в том числе и нулевое — это означает, что материальная точка покоится в положении равновесия). На синус также можно сократить, так как равенство должно выполняться в любой момент времени t . Таким образом, остаётся условие для частоты колебаний:
Отрицательную частоту можно отбросить, так как произвол в выборе здесь знака покрывается произволом выбора начальной фазы.
Общее решение уравнения записывается в виде:
Это решение исчерпывает все решения дифференциального уравнения, так как удовлетворяет любым начальным условиям.
Итак, консервативный гармонический осциллятор может совершать чисто гармонические колебания с частотой, равной его собственной частоте , с амплитудой любой величины и с произвольной начальной фазой.
Движение, совершаемое консервативным гармоническим осциллятором, носит название простого гармонического движения . Это движение не является ни вынужденным , ни затухающим .
Оно периодическое: тело колеблется с частотой ω 0 около положения равновесия по синусоидальному закону. Каждое последующее колебание такое же, как и предыдущее; период , частота и амплитуда колебаний остаются постоянными.
Учитывая, что , получим
и, поскольку , где — период колебаний,
Эти формулы показывают, что период и частота не зависят от амплитуды и начальной фазы движения.
Частота движения определяется характерными свойствами системы (например, массой движущегося тела), в то время как амплитуда и начальная фаза определяются начальными условиями — координатой и скоростью тела в момент начала колебаний. Кинетическая и потенциальная энергии системы также зависят от этих свойств и условий.
Используя приёмы дифференциального исчисления , можно получить скорость и ускорение материальной точки как функции времени:
Кинетическая энергия записывается в виде
а потенциальная энергия составляет
Тогда получается, что полная энергия
имеет постоянное значение. Это отражает «консервативность» осциллятора, то есть отсутствие энергетических потерь.
Простое гармоническое движение можно рассматривать как математическую модель различных видов движения, таких, например, как колебание пружины . Другими случаями, которые могут приближённо рассматриваться как простое гармоническое движение, являются движение маятника и вибрации молекул .
Простое гармоническое движение является основой некоторых способов анализа более сложных видов движения. Одним из таких способов является способ, основанный на преобразовании Фурье , суть которого сводится к разложению более сложного вида движения в ряд простых гармонических движений.
Любая система, в которой происходит простое гармоническое движение, обладает двумя ключевыми свойствами:
Ниже представлено несколько примеров.
Типичным примером системы, в которой происходит простое гармоническое движение, является идеализированная система груз—пружина, в которой груз присоединён к пружине и находится на горизонтальной поверхности. Если пружина не сжата и не растянута, то на груз не действует никаких переменных сил и он находится в состоянии механического равновесия. Однако, если груз вывести из положения равновесия, пружина деформируется и с её стороны будет действовать сила, стремящаяся вернуть груз в положение равновесия. В случае системы груз—пружина такой силой является сила упругости пружины, которая подчиняется закону Гука :
где k имеет вполне конкретный смысл — это коэффициент жёсткости пружины.
Однажды смещённый груз подвергается действию возвращающей силы, ускоряющей его и стремящейся вернуть в начальную точку, то есть в положение равновесия. По мере того, как груз приближается к положению равновесия, возвращающая сила уменьшается и стремится к нулю. Однако в положении x = 0 груз обладает некоторым количеством движения ( импульсом ), приобретённым благодаря действию возвращающей силы. Поэтому груз проскакивает положение равновесия, начиная снова деформировать пружину (но уже в противоположном направлении). Возвращающая сила будет стремиться замедлить его, пока скорость не станет равной нулю; и сила вновь будет стремиться вернуть груз в положение равновесия.
Если нет потерь энергии, груз будет колебаться как описано выше; такое движение является периодическим.
В случае вертикально подвешенного на пружине груза, наряду с силой упругости, действует сила тяжести, то есть суммарно сила составит
Если сделать замену переменной, чтобы оперировать не величиной , а величиной , то уравнение движения примет вид, идентичный случаю горизонтальной геометрии, только для переменной .
Колебания будут происходить с той же частотой . Однако, если в горизонтальном случае равновесию отвечало состояние недеформированной пружины, то в вертикальном варианте пружина в равновесии будет растянута. Зависимости частоты от величины ускорения свободного падения при этом нет; влияет лишь на сдвиг положения равновесия .
Измерения частоты (или периода) колебаний груза на пружине используются в устройствах для определения массы тела — так называемых массметрах , применяемых на космических станциях, когда весы не могут функционировать из-за невесомости.
Простое гармоническое движение в некоторых случаях можно рассматривать как одномерную проекцию универсального движения по окружности.
Если объект движется с постоянной угловой скоростью ω по окружности радиуса r , центром которой является начало координат плоскости x − y , то такое движение вдоль каждой из координатных осей является простым гармоническим с амплитудой r и круговой частотой ω .
В движение простого маятника является близким к простому гармоническому. Период колебаний такого маятника, прикреплённого к стержню длиной ℓ , даётся формулой
где g — ускорение свободного падения. Это показывает, что период колебаний не зависит от амплитуды и массы маятника, но зависит от g , поэтому, при той же самой длине маятника, на Луне он будет качаться медленнее, так как там слабее гравитация и меньше значение ускорения свободного падения.
Указанное приближение является корректным только при небольших углах отклонения, поскольку выражение для углового ускорения пропорционально синусу координаты:
где I — момент инерции ; в данном случае I = m ℓ 2 . Небольшие углы реализуются в условиях, когда амплитуда колебаний значительно меньше длины стержня. Наличие минуса отражает тот факт, что сила стремится приблизить тело к положению равновесия.
Когда угол θ мал, можно считать, что sin θ ≈ θ , и выражение принимает вид:
что делает угловое ускорение прямо пропорциональным углу θ , а это удовлетворяет определению простого гармонического движения.
При рассмотрении осциллятора с затуханием за основу берётся модель консервативного осциллятора, в которую добавляется сила вязкого трения. Сила вязкого трения направлена против скорости движения груза относительно среды и прямо пропорциональна этой скорости. Тогда полная сила, действующая на груз, записывается так:
Используя второй закон Ньютона, получаем дифференциальное уравнение, описывающее затухающий осциллятор:
Здесь введены обозначения:
Решение распадается на три случая.
где — частота свободных колебаний.
где
Характер движения затухающего осциллятора зависит от постоянной затухания . Помимо указанной постоянной, затухание осциллятора также часто характеризуют безразмерным параметром, называемым добротностью . Добротность обычно обозначают буквой . По определению, добротность равна:
Чем выше добротность, тем медленнее затухают колебания осциллятора.
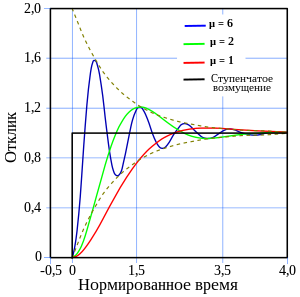
Критическое затухание примечательно тем, что именно при таком затухании осциллятор быстрее всего оказывается в положении равновесия. Если трение меньше критического, он дойдёт до положения равновесия быстрее, однако «проскочит» его по инерции и будет совершать колебания. Если трение больше критического, то осциллятор будет экспоненциально стремиться к положению равновесия, но тем медленнее, чем больше трение.
Поэтому в стрелочных индикаторах (например, в амперметрах) обычно стараются ввести именно критическое затухание, чтобы стрелка успокаивалась максимально быстро для считывания его показаний.
У осциллятора с критическим затуханием добротность равна 0,5. Соответственно, добротность указывает характер поведения осциллятора. Если добротность больше 0,5, то свободное движение осциллятора представляет собой колебания; теоретически, со временем он пересечёт положение равновесия неограниченное количество раз. Добротность, меньшая или равная 0,5, соответствует неколебательному движению осциллятора; в свободном движении он пересечёт положение равновесия не более одного раза.
Добротность иногда называют коэффициентом усиления осциллятора, так как при некоторых способах возбуждения при совпадении частоты возбуждения с резонансной частотой колебаний их амплитуда устанавливается примерно в раз больше, чем при возбуждении с той же интенсивностью на низкой частоте.
Также добротность примерно равна количеству колебательных циклов, за которое амплитуда колебаний уменьшается в раз, умноженному на .
В случае колебательного движения затухание ещё характеризуют такими параметрами, как:
Колебания осциллятора называют вынужденными, когда на него производится некоторое дополнительное воздействие извне. Это воздействие может производиться различными средствами и по различным законам. Например, силовым возбуждением называется воздействие на груз силой, зависящей только от времени по определённому закону. Кинематическим возбуждением называют воздействие на осциллятор движением точки закрепления пружины по заданному закону. Возможно также воздействие трением, когда, например, среда, с которой груз испытывает трение, совершает движение по заданному закону.
Бутиков Е. И. Учебное пособие