Хант, Уильям Холман
- 1 year ago
- 0
- 0
Шарни́рный четырёхзве́нник — плоский механизм из четырёх звеньев, соединенных между собой вращательными кинематическими парами . Одно из этих звеньев в теории механизмов и машин принимают за стойку , т. е. неподвижное звено (хотя, например, для механизмов транспортных машин понятие неподвижности стойки оказывается условностью, поскольку в этом случае сама стойка движется) .
Для звеньев плоских механизмов в теории механизмов и машин используют следующую терминологию:
Для шарнирного четырёхзвенника справедлива доказанная немецким механиком Ф. Грасгофом теорема Грасгофа о шарнирном четырёхзвеннике (иногда её также называют правилом Грасгофа ): «Наименьшее звено является кривошипом, если сумма длин наименьшего и любого другого звена меньше суммы длин остальных двух звеньев (под «наименьшим» понимается звено минимальной длины).
Применяя правило Грасгофа, удаётся подразделить все шарнирные четырёхзвенники на 3 группы:
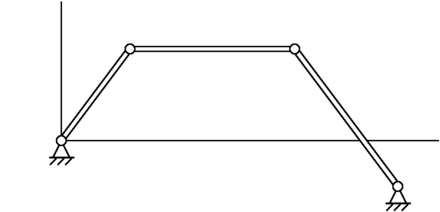
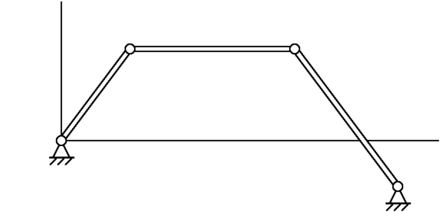
Так, представленный на приведённом выше рисунке шарнирный четырёхзвенник представляет собой двухкоромысловый механизм, поскольку правило Грасгофа для него не выполняется.
Справа дано анимированное изображение кривошипно-коромыслового механизма (здесь стойкой служит звено , кривошипом — звено , коромыслом — звено и шатуном — треугольник ).
Кинематический анализ шарнирного четырёхзвенника можно выполнить, применяя методы, основанные на построении плана скоростей . Можно воспользоваться и аналитическими методами — как общего характера (например, ), так и методами, специально предназначенными для кинематического анализа шарнирного четырёхзвенника.
К числу последних относится предложенный в 2002 г. М. Н. Кирсановым метод, основанный на составлении уравнений трёх угловых скоростей . Составим такие уравнения для механизма, представленного на верхнем рисунке.
Для этого присвоим шарнирам номера ; при этом для декартовых координат шарнира получаем обозначения и , и т. п.
Уравнения трёх угловых скоростей для рассматриваемого шарнирного четырёхзвенника имеют вид
где — угловые скорости звеньев .
Пользуясь данными уравнениями, можно, например, найти для текущей конфигурации механизма значения угловых скоростей двух его звеньев, если значение угловой скорости третьего подвижного звена известно.
Примеры практического применения шарнирного четырёхзвенника — механизм насоса, механизм сеноворошилки, механизм тестомесильной машины, механизм подъёмного крана. К шарнирным четырёхзвенникам относятся и четырёхзвенные приближённо-направляющие механизмы , предложенные П. Л. Чебышёвым (в них обеспечивается приближённое прямолинейное движение одной из точек шатуна). Частным случаем шарнирного четырёхзвенника является механизм шарнирного параллелограмма — четырёхзвенника с попарно равными по длине и попарно параллельными сторонами .