Interested Article - Электрический двигатель

- 2021-10-19
- 1

Электрический двигатель — электрическая машина ( электромеханический преобразователь ), в которой электрическая энергия , посредством магнитного поля, преобразуется в механическую .
Принцип действия
В основу работы подавляющего числа электрических машин положен принцип электромагнитной индукции . Электрическая машина состоит из неподвижной части — статора (для асинхронных и синхронных машин переменного тока), подвижной части — ротора (для асинхронных и синхронных машин переменного тока) или якоря (для машин постоянного тока). В роли индуктора на маломощных двигателях постоянного тока очень часто используются постоянные магниты .
Ротор асинхронного двигателя может быть:
- короткозамкнутым;
- фазным (с обмоткой) — используются там, где необходимо уменьшить пусковой ток и регулировать частоту вращения асинхронного электродвигателя. В большинстве случаев это крановые электродвигатели серии МТН, которые повсеместно используются в крановых установках.
Якорь — это подвижная часть машин постоянного тока (двигателя или генератора) или же работающего по этому же принципу так называемого универсального двигателя (который используется в электроинструменте).
По сути, универсальный двигатель — это тот же двигатель постоянного тока (ДПТ) с последовательным возбуждением (обмотки якоря и индуктора включены последовательно). Отличие только в расчётах обмоток. На постоянном токе отсутствует реактивное (индуктивное или ёмкостное) сопротивление. Поэтому любая « болгарка », если из неё извлечь электронный блок, будет вполне работоспособна и на постоянном токе, но при меньшем напряжении сети.
Принцип действия трёхфазного асинхронного электродвигателя
При включении в сеть в статоре возникает круговое вращающееся магнитное поле, которое пронизывает короткозамкнутую обмотку ротора и наводит в ней ток индукции. Отсюда, следуя закону Ампера (на проводник с током, помещённый в магнитное поле, действует отклоняющая сила), ротор приходит во вращение. Частота вращения ротора зависит от частоты питающего напряжения и от числа пар магнитных полюсов.
Разность между частотой вращения магнитного поля статора и частотой вращения ротора характеризуется скольжением . Двигатель называется асинхронным, так как частота вращения магнитного поля статора не совпадает с частотой вращения ротора.
Синхронный двигатель имеет отличие в конструкции ротора. Ротор выполняется либо постоянным магнитом, либо электромагнитом, либо имеет в себе часть беличьей клетки (для запуска) и постоянные магниты или электромагниты. В синхронном двигателе частота вращения магнитного поля статора и частота вращения ротора совпадают. Для запуска используют вспомогательные асинхронные электродвигатели, либо ротор с короткозамкнутой обмоткой. Синхронные двигатели сложнее и дороже асинхронных, а посему применяются значительно реже.
Асинхронные двигатели нашли широкое применение во всех отраслях техники. Особенно это касается простых по конструкции и прочных трёхфазных асинхронных двигателей с коротко-замкнутыми роторами, которые надёжнее и дешевле всех электрических двигателей и практически не требуют никакого ухода. Там, где нет трёхфазной сети, асинхронный двигатель может включаться в сеть однофазного тока.
Статор асинхронного электродвигателя состоит, как и в синхронной машине, из пакета, набранного из лакированных листов электротехнической стали толщиной 0,5 мм, в пазах которого уложена обмотка. Три фазы обмотки статора асинхронного трёхфазного двигателя, пространственно смещённые на 120°, соединяются друг с другом звездой или треугольником.
На рисунке показана принципиальная схема двухполюсной машины — по четыре паза на каждую фазу. При питании обмоток статора от трёхфазной сети получается вращающееся поле, так как токи в фазах обмотки, которые смещены в пространстве на 120° друг относительно друга сдвинуты по фазе друг относительно друга на 120°.
Для синхронной частоты вращения nc поля электродвигателя с р парами полюсов справедливо при частоте тока :


При частоте 50 Гц получаем для = 1, 2, 3 (двух-, четырёх- и шести-полюсных машин) синхронные частоты вращения поля = 3000, 1500 и 1000 об/мин.


Ротор асинхронного электродвигателя также состоит из листов электротехнической стали и может быть выполнен в виде короткозамкнутого ротора (с « беличьей клеткой ») или ротора с контактными кольцами (фазный ротор).
В короткозамкнутом роторе обмотка состоит из металлических стержней (медь, бронза или алюминий), которые расположены в пазах и соединяются на концах закорачивающими кольцами. Соединение осуществляется методом пайки твердым припоем или сваркой. В случае применения алюминия или алюминиевых сплавов стержни ротора и закорачивающие кольца, включая лопасти вентилятора, расположенные на них, изготавливаются методом литья под давлением.
У ротора электродвигателя с контактными кольцами в пазах находится трёхфазная обмотка, похожая на обмотку статора, включённую, например, звездой; начала фаз соединяются с тремя контактными кольцами, закреплёнными на валу. При пуске двигателя и для регулировки частоты вращения можно подключить к фазам обмотки ротора реостаты (через контактные кольца и щётки). После успешного разбега контактные кольца замыкаются накоротко, так что обмотка ротора двигателя выполняет те же самые функции, что и в случае короткозамкнутого ротора.
Асинхронные электродвигатели широко применяются в тяжелой промышленности в качестве вспомогательных машин для компрессоров или выпрямительных установок.
Асинхронные электродвигатели имеют ряд преимуществ перед коллекторными, такие как: меньший износ якоря за счет отсутствия коллектора, вариативность управления, более высокий КПД и простота конструкции [ источник не указан 1543 дня ] .
В 2018 году группа болгарских изобретателей под руководством Александра Христова разработала более эффективный вариант асинхронного двигателя, в котором внешняя часть ротора с электрическими обмотками отделена от ферромагнитного сердечника . Внутренняя ферромагнитная часть ротора крепится с помощью подшипников к валу двигателя и может вращаться отдельно от внешней части ротора. Таким образом, внешняя часть ротора вместе с валом вращается асинхронно, как в традиционных асинхронных двигателях, а внутренняя часть ротора вращается синхронно с магнитным полем, создаваемым статором, т. е. как ротор синхронного двигателя. Таким образом снижаются потери за счет исключения образования вихревых токов в ферромагнитном сердечнике ротора и его непрерывного перемагничивания.
Классификация электродвигателей
По принципу возникновения вращающего момента электродвигатели можно разделить на гистерезисные и магнитоэлектрические . У двигателей первой группы вращающий момент создаётся вследствие гистерезиса при перемагничивании ротора. Данные двигатели не являются традиционными и не широко распространены в промышленности.
Наиболее распространены магнитоэлектрические двигатели, которые по типу потребляемой энергии подразделяется на две большие группы — на двигатели постоянного тока и двигатели переменного тока (также существуют универсальные двигатели , которые могут питаться обоими видами тока).
Двигатели постоянного тока

Двигатель постоянного тока — двигатель, переключение фаз в котором осуществляется прямо в самом двигателе. Благодаря этому такой двигатель может питаться постоянным током, но также и переменным. Первый коммутаторный электродвигатель постоянного тока, способный вращать механизмы, был изобретён британским ученым Уильямом Стёрдженом в 1832 году . Следуя работе Стёрджена, американский изобретатель Томас Дэвенпорт и его жена Эмили Дэвенпорт построили электродвигатель постоянного тока коммутаторного типа, который он запатентовал в 1837 году .
Данная группа двигателей в свою очередь разделяется по способу переключения фаз и наличию обратной связи подразделяется на:
- Коллекторные двигатели ;
- Вентильные двигатели (бесколлекторный электродвигатель).
Щёточно-коллекторный узел обеспечивает электрическое синхронное переключение цепей вращающейся части машины и является наиболее ненадёжным и сложным в обслуживании конструктивным элементом.
По типу возбуждения коллекторные двигатели можно разделить на:
- Двигатели с независимым возбуждением от электромагнитов и постоянных магнитов ;
- Двигатели с самовозбуждением.
Двигатели с самовозбуждением делятся на:
- Двигатели с параллельным возбуждением (обмотка якоря включается параллельно обмотке возбуждения);
- Двигатели последовательного возбуждения (обмотка якоря включается последовательно обмотке возбуждения);
- Двигатели смешанного возбуждения (часть обмотки возбуждения включается последовательно с якорем, а вторая часть — параллельно обмотке якоря или последовательно соединённым обмотке якоря и первой обмотки возбуждения, в зависимости от требуемой нагрузочной характеристики).
Бесколлекторные двигатели ( вентильные двигатели ) — электродвигатели в котором переключение фаз осуществляется с помощью специального электронного блока ( инвертора ), могут быть с обратной связью с использованием датчика положения ротора , либо без обратной связи, фактически аналог асинхронного.
Двигатели пульсирующего тока
Двигатель пульсирующего тока — электрический двигатель, питание которого осуществляется пульсирующим электрическим током . По конструкции очень близок к двигателю постоянного тока. Его конструктивными отличиями от двигателя постоянного тока являются хренвирования вставки в остове, шихтованные дополнительные полюса, большее число пар полюсов, наличие компенсационной обмотки. Применяется на электровозах с установками для выпрямления переменного тока
Двигатели переменного тока
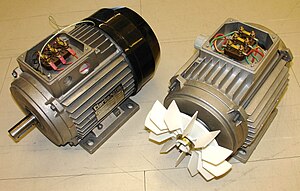
Двигатель переменного тока — электрический двигатель, питание которого осуществляется переменным током . По принципу работы эти двигатели разделяются на синхронные и асинхронные двигатели . Принципиальное различие состоит в том, что в синхронных машинах первая гармоника магнитодвижущей силы статора движется со скоростью вращения ротора (благодаря чему сам ротор вращается со скоростью вращения магнитного поля в статоре), а у асинхронных — всегда есть разница между скоростью вращения ротора и скоростью вращения магнитного поля в статоре (поле вращается быстрее ротора).
Синхронный электродвигатель — электродвигатель переменного тока, ротор которого вращается синхронно с магнитным полем питающего напряжения.
Синхронные электродвигатели подразделяются на :
- синхронный двигатель с обмотками возбуждения. Данные двигатели обычно используются при больших мощностях (от сотен киловатт и выше).
- синхронный двигатель с постоянными магнитами;
- синхронный реактивный двигатель;
- гистерезисный двигатель ;
- шаговый двигатель ;
- гибридный синхронный реактивный двигатель с постоянными магнитами;
- реактивно-гистерезисный двигатель.
Существуют синхронные двигатели с дискретным угловым перемещением ротора — шаговые двигатели . У них заданное положение ротора фиксируется подачей питания на соответствующие обмотки. Переход в другое положение осуществляется путём снятия напряжения питания с одних обмоток и передачи его на другие. Ещё один вид синхронных двигателей — вентильный реактивный электродвигатель , питание обмоток которого формируется при помощи полупроводниковых элементов.
Асинхронный электродвигатель — электродвигатель переменного тока, в котором частота вращения ротора отличается от частоты вращающего магнитного поля, создаваемого питающим напряжением. Эти двигатели наиболее распространены в настоящее время.
По количеству фаз двигатели переменного тока подразделяются на:
- однофазные — запускаются вручную, имеют пусковую обмотку, фазосдвигающую цепь или экранированные полюса ;
- двухфазные — в том числе конденсаторные ;
- трёхфазные ;
- ;
Универсальный коллекторный электродвигатель
Универсальный коллекторный электродвигатель — коллекторный электродвигатель, который может работать и на постоянном, и на переменном токе. Изготавливается только с последовательной обмоткой возбуждения на мощности до 200 Вт. Статор выполняется шихтованным (набранный из отдельных пластин) из специальной электротехнической стали. Обмотка возбуждения включается частично при переменном токе и полностью при постоянном. Для переменного тока номинальные напряжения 127, 220 В, для постоянного 110, 220 В. Применяется в бытовых аппаратах, электроинструментах.
Двигатели переменного тока с питанием от промышленной сети 50 Гц не позволяют получить частоту вращения выше 3000 об/мин. Поэтому для получения высоких частот применяют коллекторный электродвигатель, который к тому же получается легче и меньше двигателя переменного тока той же мощности или применяют специальные передаточные механизмы, изменяющие кинематические параметры механизма до необходимых нам (мультипликаторы).
При применении преобразователей частоты или наличии сети повышенной частоты (100, 200, 400 Гц) двигатели переменного тока оказываются легче и меньше коллекторных двигателей (коллекторный узел иногда занимает половину пространства). Ресурс асинхронных двигателей переменного тока гораздо выше, чем у коллекторных, и определяется состоянием подшипников и изоляции обмоток.
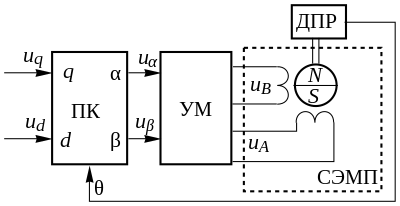
Синхронный двигатель с датчиком положения ротора и инвертором является электронным аналогом коллекторного двигателя постоянного тока.
Строго говоря, универсальный коллекторный двигатель является коллекторным электродвигателем постоянного тока с последовательно включёнными обмотками возбуждения (статора), оптимизированным для работы на переменном токе бытовой электрической сети. Такой тип двигателя независимо от полярности подаваемого напряжения вращается в одну сторону, так как за счёт последовательного соединения обмоток статора и ротора смена полюсов их магнитных полей происходит одновременно и результирующий момент остаётся направленным в одну сторону. Для возможности работы на переменном токе применяется статор из магнитно-мягкого материала, имеющего малый гистерезис (сопротивление перемагничиванию). Для уменьшения потерь на вихревые токи статор выполняют наборным из изолированных пластин. Особенностью (в большинстве случаев — достоинством) работы такого двигателя именно на переменном токе (а не на постоянном такого же напряжения) является то, что в режиме малых оборотов (пуск и перегрузка) индуктивное сопротивление обмоток статора ограничивает потребляемый ток и соответственно максимальный момент двигателя (оценочно) до 3—5 от номинального (против 5—10 при питании того же двигателя постоянным током). Для сближения механических характеристик у двигателей общего назначения может применяться секционирование обмоток статора — отдельные выводы (и меньшее число витков обмотки статора) для подключения переменного тока.
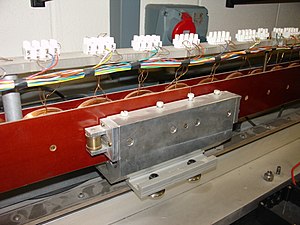
Синхронный электродвигатель возвратно-поступательного движения
Принцип его работы заключается в том, что подвижная часть двигателя представляет собой постоянные магниты, закреплённые на штоке. Через неподвижные обмотки пропускается переменный ток и постоянные магниты под действием магнитного поля, создаваемого обмотками, перемещают шток возвратно-поступательным образом.
История
Принцип преобразования электрической энергии в механическую энергию электромагнитным полем был продемонстрирован британским учёным Майклом Фарадеем в 1821 и состоял из свободно висящего провода, окунающегося в ртуть. Постоянный магнит был установлен в середине ванны со ртутью. Когда через провод пропускался ток, провод вращался вокруг магнита, показывая, что ток вызывал циклическое магнитное поле вокруг провода . Это устройство часто демонстрируется на школьных уроках физики, вместо токсичной ртути используют электролит. Это — самый простой вид из класса электрических двигателей. Последующим усовершенствованием является Колесо Барлоу . Оно было демонстрационным устройством, непригодным в практических применениях из-за ограниченной мощности.
Изобретатели стремились создать электродвигатель для производственных нужд. Они пытались заставить железный сердечник двигаться в поле электромагнита возвратно-поступательно, то есть так, как движется поршень в цилиндре паровой машины. Русско-прусский учёный Б.С. Якоби пошёл иным путём. В 1834 году он создал первый в мире практически пригодный электродвигатель со вращающимся якорем и опубликовал теоретическую работу «О применении электромагнетизма для приведения в движение машины». Б. С. Якоби писал, что его двигатель несложен и «даёт непосредственно круговое движение, которое гораздо легче преобразовать в другие виды движения, чем возвратно-поступательное».
Вращательное движение якоря в двигателе Якоби происходило вследствие попеременного притяжения и отталкивания электромагнитов. Неподвижная группа U-образных электромагнитов питалась током непосредственно от гальванической батареи, причем направление тока в этих электромагнитах оставалось неизменным. Подвижная группа электромагнитов была подключена к батарее через коммутатор, с помощью которого направление тока в каждом электромагните изменялось восемь раз за один оборот диска. Полярность электромагнитов при этом соответственно изменялась, а каждый из подвижных электромагнитов попеременно притягивался и отталкивался соответствующим неподвижным электромагнитом: вал двигателя начинал вращаться. Мощность такого двигателя составляла всего 15 Вт. Впоследствии Якоби довёл мощность электродвигателя до 550 Вт. Этот двигатель был установлен сначала на лодке, а позже на железнодорожной платформе.
В 1839 году Якоби построил лодку с электромагнитным двигателем, который от 69 элементов Грове развивал 1 лошадиную силу и двигал лодку с 14 пассажирами по Неве против течения. Это было первое применение электромагнетизма к передвижению в больших размерах.
Примечания
- (англ.) .
- Rob Mead last updated. (англ.) . TechRadar (26 февраля 2009). Дата обращения: 3 декабря 2021. 3 декабря 2021 года.
- Vare, Ethlie Ann. Patently Female: From AZT to TV Dinners, Stories of Women Inventors and Their Breakthrough Ideas / Ethlie Ann Vare, Greg Ptacek. — Hoboken, NJ : John Wiley & Sons, Inc, November 2001. — P. 28. — ISBN 978-0-471-02334-0 .
- , с. 27.
- Сидоров Н. И., Сидорова Н. Н. Как устроен и работает электровоз — М.: Транспорт, 1988. — ISBN 5-277-00191-3 . — Тираж 70000 экз. — С. 47.
- . engineering-solutions.ru. Дата обращения: 7 сентября 2016. 31 августа 2016 года.
- . СИСТЕМАКС . Дата обращения: 3 декабря 2021. 3 декабря 2021 года.
- , с. 28.
- Хитерер М. Я., Овчинников И. Е. Синхронные электрические машины возвратно-поступательного движения, СПб., Корона, 2008, ISBN 978-5-7931-0493-7
- Войнаровский П. Д. ,. // Энциклопедический словарь Брокгауза и Ефрона : в 86 т. (82 т. и 4 доп.). — СПб. , 1890—1907.
Литература
- Белов М. П., Новиков В. А., Рассудов Л. Н. Автоматизированный электропривод типовых производственных механизмов и технологических комплексов. — 3-е изд., испр. — М. : Издательский центр «Академия», 2007. — 575 с. — (Высшие профессиональное образование). — 1000 экз. — ISBN 978-5-7695-4497-2 .
- Войнаровский П. Д. ,. // Энциклопедический словарь Брокгауза и Ефрона : в 86 т. (82 т. и 4 доп.). — СПб. , 1890—1907.
Ссылки
|
||||||||||||||||||
|
||||||||||||||||||
|
||||||||||||||||||
|
||||||||||||||||||
|
||||||||||||||||||
|
||||||||||||||||||
|
||||||||||||||||||
- 2021-10-19
- 1