Пространство состояний
— в
теории управления
один из основных методов описания поведения динамической системы. Движение системы в пространстве состояний отражает изменение её
состояний
.
Определение
Пространство состояний
обычно называют
фазовым пространством
динамической системы
, а траекторию движения
изображающей точки
в этом пространстве —
фазовой траекторией
.
В пространстве состояний создаётся модель
динамической системы
, включающая набор переменных входа, выхода и
состояния
, связанных между собой
дифференциальными уравнениями
первого порядка, которые записываются в
матричной
форме. В отличие от описания в виде
передаточной функции
и других методов частотной области, пространство состояний позволяет работать не только с линейными системами и нулевыми начальными условиями. Кроме того, в пространстве состояний относительно просто работать с
MIMO
-системами.
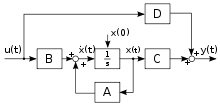
Линейные непрерывные системы
Структурная схема непрерывной линейной системы, описанной в виде переменных состояния
Для случая линейной системы с
p
{\displaystyle p}
входами,
q
{\displaystyle q}
выходами и
n
{\displaystyle n}
переменными состояния описание имеет вид:
x
˙
(
t
)
=
A
(
t
)
x
(
t
)
+
B
(
t
)
u
(
t
)
{\displaystyle {\dot {\mathbf {x} }}(t)=A(t)\mathbf {x} (t)+B(t)\mathbf {u} (t)}
y
(
t
)
=
C
(
t
)
x
(
t
)
+
D
(
t
)
u
(
t
)
{\displaystyle \mathbf {y} (t)=C(t)\mathbf {x} (t)+D(t)\mathbf {u} (t)}
где
x
(
t
)
∈
R
n
{\displaystyle x(t)\in \mathbb {R} ^{n}}
;
y
(
t
)
∈
R
q
{\displaystyle y(t)\in \mathbb {R} ^{q}}
;
u
(
t
)
∈
R
p
{\displaystyle u(t)\in \mathbb {R} ^{p}}
;
dim
[
A
(
⋅
)
]
=
n
×
n
{\displaystyle \operatorname {dim} [A(\cdot )]=n\times n}
,
dim
[
B
(
⋅
)
]
=
n
×
p
{\displaystyle \operatorname {dim} [B(\cdot )]=n\times p}
,
dim
[
C
(
⋅
)
]
=
q
×
n
{\displaystyle \operatorname {dim} [C(\cdot )]=q\times n}
,
dim
[
D
(
⋅
)
]
=
q
×
p
{\displaystyle \operatorname {dim} [D(\cdot )]=q\times p}
,
x
˙
(
t
)
:=
d
x
(
t
)
d
t
{\displaystyle {\dot {\mathbf {x} }}(t):={d\mathbf {x} (t) \over dt}}
:
x
(
⋅
)
{\displaystyle x(\cdot )}
—
вектор состояния
, элементы которого называются
состояниями системы
y
(
⋅
)
{\displaystyle y(\cdot )}
—
вектор выхода
,
u
(
⋅
)
{\displaystyle u(\cdot )}
—
вектор управления
,
A
(
⋅
)
{\displaystyle A(\cdot )}
—
матрица системы
,
B
(
⋅
)
{\displaystyle B(\cdot )}
—
матрица управления
,
C
(
⋅
)
{\displaystyle C(\cdot )}
—
матрица выхода,
D
(
⋅
)
{\displaystyle D(\cdot )}
—
матрица прямой связи
.
Часто матрица
D
(
⋅
)
{\displaystyle D(\cdot )}
является нулевой, это означает, что в системе нет явной
.
Дискретные системы
Для
дискретных систем
запись уравнений в пространстве основывается не на
дифференциальных
, а на
уравнениях:
x
(
n
T
+
T
)
=
A
(
n
T
)
x
(
n
T
)
+
B
(
n
T
)
u
(
n
T
)
{\displaystyle \mathbf {x} (nT+T)=A(nT)\mathbf {x} (nT)+B(nT)\mathbf {u} (nT)}
y
(
n
T
)
=
C
(
n
T
)
x
(
n
T
)
+
D
(
n
T
)
u
(
n
T
)
{\displaystyle \mathbf {y} (nT)=C(nT)\mathbf {x} (nT)+D(nT)\mathbf {u} (nT)}
Нелинейные системы
Нелинейная динамическая система n-го порядка может быть описана в виде системы из n уравнений 1-го порядка:
x
˙
1
=
f
1
(
x
1
(
t
)
;
…
,
x
n
(
t
)
,
u
1
(
t
)
,
…
,
u
m
(
t
)
)
{\displaystyle {\dot {x}}_{1}=f_{1}(x_{1}(t);\ldots ,x_{n}(t),u_{1}(t),\ldots ,u_{m}(t))}
⋮
{\displaystyle \vdots }
x
˙
n
=
f
n
(
x
1
(
t
)
;
…
,
x
n
(
t
)
,
u
1
(
t
)
,
…
,
u
m
(
t
)
)
{\displaystyle {\dot {x}}_{n}=f_{n}(x_{1}(t);\ldots ,x_{n}(t),u_{1}(t),\ldots ,u_{m}(t))}
или в более компактной форме:
x
˙
(
t
)
=
f
(
t
,
x
(
t
)
,
u
(
t
)
)
{\displaystyle \mathbf {\dot {x}} (t)=\mathbf {f} (t,\mathbf {x} (t),\mathbf {u} (t))}
y
(
t
)
=
h
(
t
,
x
(
t
)
,
u
(
t
)
)
{\displaystyle \mathbf {y} (t)=\mathbf {h} (t,\mathbf {x} (t),\mathbf {u} (t))}
.
Первое уравнение — это
уравнение состояния
, второе —
уравнение выхода
.
Линеаризация
В некоторых случаях возможна
линеаризация
описания динамической системы для окрестности рабочей точки
(
x
~
,
u
~
)
{\displaystyle (\mathbf {\tilde {x}} ,\mathbf {\tilde {u}} )}
.
В установившемся режиме
(
u
~
=
c
o
n
s
t
)
{\displaystyle (\mathbf {\tilde {u}} =const)}
для рабочей точки
x
~
=
c
o
n
s
t
,
{\displaystyle \mathbf {\tilde {x}} =const,}
справедливо следующее выражение:
x
˙
=
f
(
x
~
,
u
~
)
=
0
{\displaystyle \mathbf {\dot {x}} =\mathbf {f} (\mathbf {\tilde {x}} ,\mathbf {\tilde {u}} )=\mathbf {0} }
Вводя обозначения:
δ
u
=
u
−
u
~
{\displaystyle \delta \mathbf {u} =\mathbf {u} -\mathbf {\tilde {u}} }
δ
x
=
x
−
x
~
{\displaystyle \delta \mathbf {x} =\mathbf {x} -\mathbf {\tilde {x}} }
Разложение уравнения состояния
f
(
x
(
t
)
,
u
(
t
)
)
{\displaystyle \mathbf {f} (\mathbf {x} (t),\mathbf {u} (t))}
в
ряд Тейлора
, ограниченное первыми двумя членами даёт следующее выражение:
f
(
x
(
t
)
,
u
(
t
)
)
≈
f
(
x
~
(
t
)
,
u
~
(
t
)
)
+
δ
f
δ
x
δ
x
+
δ
f
δ
u
δ
u
{\displaystyle \mathbf {f} (\mathbf {x} (t),\mathbf {u} (t))\approx \mathbf {f} (\mathbf {\tilde {x}} (t),\mathbf {\tilde {u}} (t))+{\frac {\delta \mathbf {f} }{\delta \mathbf {x} }}\delta \mathbf {x} +{\frac {\delta \mathbf {f} }{\delta \mathbf {u} }}\delta \mathbf {u} }
При взятии частных производных вектор-функции
f
{\displaystyle \mathbf {f} }
по вектору переменных состояний
x
{\displaystyle \mathbf {x} }
и вектору входных воздействий
u
{\displaystyle \mathbf {u} }
получаются
матрицы Якоби
соответствующих систем функций:
δ
f
δ
x
=
[
δ
f
1
δ
x
1
⋯
δ
f
1
δ
x
n
⋮
⋱
⋮
δ
f
n
δ
x
1
⋯
δ
f
n
δ
x
n
]
δ
f
δ
u
=
[
δ
f
1
δ
u
1
⋯
δ
f
1
δ
u
p
⋮
⋱
⋮
δ
f
n
δ
u
1
⋯
δ
f
n
δ
u
p
]
{\displaystyle {\frac {\delta \mathbf {f} }{\delta \mathbf {x} }}={\begin{bmatrix}{\frac {\delta \mathbf {f_{1}} }{\delta \mathbf {x_{1}} }}&\cdots &{\frac {\delta \mathbf {f_{1}} }{\delta \mathbf {x_{n}} }}\\\vdots &\ddots &\vdots \\{\frac {\delta \mathbf {f_{n}} }{\delta \mathbf {x_{1}} }}&\cdots &{\frac {\delta \mathbf {f_{n}} }{\delta \mathbf {x_{n}} }}\end{bmatrix}}\quad {\frac {\delta \mathbf {f} }{\delta \mathbf {u} }}={\begin{bmatrix}{\frac {\delta \mathbf {f_{1}} }{\delta \mathbf {u_{1}} }}&\cdots &{\frac {\delta \mathbf {f_{1}} }{\delta \mathbf {u_{p}} }}\\\vdots &\ddots &\vdots \\{\frac {\delta \mathbf {f_{n}} }{\delta \mathbf {u_{1}} }}&\cdots &{\frac {\delta \mathbf {f_{n}} }{\delta \mathbf {u_{p}} }}\end{bmatrix}}}
.
Аналогично для функции выхода:
δ
h
δ
x
=
[
δ
h
1
δ
x
1
⋯
δ
h
1
δ
x
n
⋮
⋱
⋮
δ
h
q
δ
x
1
⋯
δ
h
q
δ
x
n
]
δ
h
δ
u
=
[
δ
h
1
δ
u
1
⋯
δ
h
1
δ
u
p
⋮
⋱
⋮
δ
h
q
δ
u
1
⋯
δ
h
q
δ
u
p
]
{\displaystyle {\frac {\delta \mathbf {h} }{\delta \mathbf {x} }}={\begin{bmatrix}{\frac {\delta \mathbf {h_{1}} }{\delta \mathbf {x_{1}} }}&\cdots &{\frac {\delta \mathbf {h_{1}} }{\delta \mathbf {x_{n}} }}\\\vdots &\ddots &\vdots \\{\frac {\delta \mathbf {h_{q}} }{\delta \mathbf {x_{1}} }}&\cdots &{\frac {\delta \mathbf {h_{q}} }{\delta \mathbf {x_{n}} }}\end{bmatrix}}\quad {\frac {\delta \mathbf {h} }{\delta \mathbf {u} }}={\begin{bmatrix}{\frac {\delta \mathbf {h_{1}} }{\delta \mathbf {u_{1}} }}&\cdots &{\frac {\delta \mathbf {h_{1}} }{\delta \mathbf {u_{p}} }}\\\vdots &\ddots &\vdots \\{\frac {\delta \mathbf {h_{q}} }{\delta \mathbf {u_{1}} }}&\cdots &{\frac {\delta \mathbf {h_{q}} }{\delta \mathbf {u_{p}} }}\end{bmatrix}}}
Учитывая
δ
x
˙
=
x
˙
−
x
~
˙
=
x
˙
{\displaystyle \delta \mathbf {\dot {x}} =\mathbf {\dot {x}} -\mathbf {\dot {\tilde {x}}} =\mathbf {\dot {x}} }
, линеаризованное описание динамической системы в окрестности рабочей точки примет вид:
x
˙
{\displaystyle \mathbf {\dot {x}} }
=
A
δ
x
+
B
δ
u
{\displaystyle =\mathbf {A} \delta \mathbf {x} +\mathbf {B} \delta \mathbf {u} }
δ
y
{\displaystyle \delta \mathbf {y} }
=
C
δ
x
+
D
δ
u
{\displaystyle =\mathbf {C} \delta \mathbf {x} +\mathbf {D} \delta \mathbf {u} }
где
A
=
δ
f
δ
x
B
=
δ
f
δ
u
C
=
δ
h
δ
x
D
=
δ
h
δ
u
{\displaystyle \mathbf {A} ={\frac {\delta \mathbf {f} }{\delta \mathbf {x} }}\quad \mathbf {B} ={\frac {\delta \mathbf {f} }{\delta \mathbf {u} }}\quad \mathbf {C} ={\frac {\delta \mathbf {h} }{\delta \mathbf {x} }}\quad \mathbf {D} ={\frac {\delta \mathbf {h} }{\delta \mathbf {u} }}}
.
Примеры
Модель в пространстве состояний для маятника
Маятник
является классической свободной
нелинейной системой
. Математически движение маятника описывается следующим соотношением:
m
l
θ
¨
(
t
)
=
−
m
g
sin
θ
(
t
)
−
k
l
θ
˙
(
t
)
{\displaystyle ml{\ddot {\theta }}(t)=-mg\sin \theta (t)-kl{\dot {\theta }}(t)}
где
θ
(
t
)
{\displaystyle \theta (t)}
— угол отклонения маятника.
m
{\displaystyle m}
— приведённая масса маятника
g
{\displaystyle g}
— ускорение свободного падения
k
{\displaystyle k}
— коэффициент
трения
в
подшипнике
подвеса
l
{\displaystyle l}
— длина подвеса маятника
В таком случае уравнения в пространстве состояний будут иметь вид:
x
1
˙
(
t
)
=
x
2
(
t
)
{\displaystyle {\dot {x_{1}}}(t)=x_{2}(t)}
x
2
˙
(
t
)
=
−
g
l
sin
x
1
(
t
)
−
k
m
x
2
(
t
)
{\displaystyle {\dot {x_{2}}}(t)=-{\frac {g}{l}}\sin {x_{1}}(t)-{\frac {k}{m}}{x_{2}}(t)}
где
x
1
(
t
)
:=
θ
(
t
)
{\displaystyle x_{1}(t):=\theta (t)}
— угол отклонения маятника
x
2
(
t
)
:=
x
1
˙
(
t
)
{\displaystyle x_{2}(t):={\dot {x_{1}}}(t)}
—
угловая скорость
маятника
x
2
˙
(
t
)
:=
x
1
¨
(
t
)
{\displaystyle {\dot {x_{2}}}(t):={\ddot {x_{1}}}(t)}
—
угловое ускорение
маятника
Запись уравнений состояния в общем виде:
x
˙
(
t
)
=
(
x
1
˙
(
t
)
x
2
˙
(
t
)
)
=
f
(
t
,
x
(
t
)
)
=
(
x
2
(
t
)
−
g
l
sin
x
1
(
t
)
−
k
m
x
2
(
t
)
)
{\displaystyle {\dot {\mathbf {x} }}(t)=\left({\begin{matrix}{\dot {x_{1}}}(t)\\{\dot {x_{2}}}(t)\end{matrix}}\right)=\mathbf {f} (t,x(t))=\left({\begin{matrix}x_{2}(t)\\-{\frac {g}{l}}\sin {x_{1}}(t)-{\frac {k}{m}}{x_{2}}(t)\end{matrix}}\right)}
.
Линеаризация модели маятника
Линеаризованная матрица системы для модели маятника в окрестности точки равновесия
(
x
~
1
=
0
)
{\displaystyle \left({\tilde {x}}_{1}=0\right)}
имеет вид:
δ
f
δ
x
=
(
0
1
−
g
l
cos
x
~
1
−
k
m
)
=
(
0
1
−
g
l
−
k
m
)
{\displaystyle {\frac {\delta \mathbf {f} }{\delta \mathbf {x} }}=\left({\begin{matrix}0&\ 1\\-{\frac {g}{l}}\cos {{\tilde {x}}_{1}}&\ -{\frac {k}{m}}\end{matrix}}\right)=\left({\begin{matrix}0&\ 1\\-{\frac {g}{l}}&\ -{\frac {k}{m}}\end{matrix}}\right)}
При отсутствии трения в подвесе (
k
= 0
) получим уравнение движения
математического маятника
:
x
¨
=
−
g
l
x
{\displaystyle {\ddot {x}}=-{\frac {g}{l}}x}
См. также
Литература
Андронов А. А.
,
Леонтович Е. А.
,
Гордон И. М.
,
Майер А. Г.
Теория бифуркаций динамических систем на плоскости. —
М.
: Наука, 1967.
Андронов А. А.
,
Витт А. А.
,
Хайкин С. Э.
Теория колебаний. — 2-е изд., перераб. и испр.. —
М.
: Наука, 1981. — 918 с.
Ссылки








![\operatorname{dim}[A(\cdot)] = n \times n](/images/005/564/5564074/10.jpg?rand=448523)
![\operatorname{dim}[B(\cdot)] = n \times p](/images/005/564/5564074/11.jpg?rand=960172)
![\operatorname{dim}[C(\cdot)] = q \times n](/images/005/564/5564074/12.jpg?rand=602767)
![\operatorname{dim}[D(\cdot)] = q \times p](/images/005/564/5564074/13.jpg?rand=466976)