Microsoft Robotics Developer Studio
(Microsoft RDS,
MRDS
) —
Windows
-ориентированная среда для управления
роботами
и их
симуляции
. Данный продукт предназначен для академической, любительской или коммерческой разработки и поддерживает большое количество разнообразного аппаратного обеспечения роботов.
RDS основана на библиотеке CCR (
Concurrency and Coordination Runtime
),
.NET
-реализации библиотеки для работы с параллельными и
асинхронными
потоками данных, используя
обмен сообщениями
, и DSS (
) — облегченное средство создания распределенных приложений на основе сервисов, которое предусматривает управление множеством сервисов для корректировки поведения в целом.
Microsoft Robotics Developer Studio поддерживает модульность для добавления новых сервисов в комплект. В настоящее время доступны:
Soccer Simulation (Симуляция футбола)
Sumo Competition (Соревнование по сумо) от Microsoft
разработанный сообществом Maze Simulator (Симулятор лабиринта) — программа для создания миров и стен, которые могут исследовать при помощи виртуального
робота
.
CCR и DSS также доступны в отдельном виде для применения в коммерческих приложениях, требующих высокого уровня параллелизма и/или возможности взаимодействия между множеством узлов в сети. Данный пакет называется
(CCR и DSS инструментарий).
Инструменты
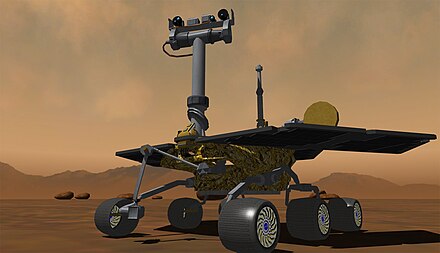
Симуляция робота и окружения в MRDS
Инструменты, позволяющие разрабатывать MRDS-приложения, включают в себя графическую среду (Microsoft Visual Programming Language : VPL); утилиты командной строки, позволяющие взаимодействовать с проектами Visual Studio (версии VS Express вполне достаточно) на языках C#, C++ или VB.NET; поддержку скриптовых языков, как например, IronPython; и инструменты симуляции 3D.
Они могут быть связаны графическим способом: сервис или действие представляются в виде блока, у которого есть ввод и вывод, и его нужно лишь перетащить из каталога на диаграмму.
Связывание можно сделать при помощи мыши, это позволяет вам определить, являются ли сигналы синхронными или нет, позволяет вам выполнять операции, связанные с передачей значений и пр.
VPL также позволяет вам генерировать код новых «макро»-сервисов на основе диаграмм, созданных пользователями.
В VPL возможна простая настройка сервисов для различных аппаратных элементов.
Среда симуляции 3D в MRDS позволяет вам симулировать поведение роботов в виртуальном мире, используя технологию NVIDIA PhysX (3D-движок который первоначально был написан компанией Ageia), что позволяет использовать продвинутую физическую модель.
Множество примеров и руководств, доступных для различных инструментов, ускоряющих понимание и усваивание MRDS. В комплект добавлено несколько приложений, среди них, например, упоминавшиеся выше Maze Simulator или Soccer Simulation, разработанные корпорацией
Microsoft
.
Также в стандартном и академическом изданиях MRDS присутствуют 3 небольшие симуляционные среды, которые являются ограниченными версиями более крупных обобщенных симуляционных сред, разработанных компанией
Комната (также доступна в экспресс-издании)
Открытая местность
Город
Недостатки
Нет учета и поддержки реальной среды эксплуатации робота (тип поверхности его перемещения, погодные условия и пр.)
При управлении реальным роботом используется его симуляция, которая может не полностью совпадать с реальным прототипом.
Чем точнее модель, тем больше настроек она требует.
Несмотря на использование PhysX, физика в MRDS является сильно упрощенной.
MySpace
использует MRDS для разработки приложений (не предназначенных для роботов), используемых в серверной (back end) части их сайта.
Университет Индианы
использует MRDS для разработки приложений (не предназначенных для роботов), применяемых для координации сети высокозатратных вычислений.
В 2008 году
Microsoft
запустила соревнование по симуляции
робототехники
под названием
, использующее MRDS, по четырем категориям: универсальная, сумо, город, марсоход. Симулированная среда и роботы, задействованные в соревновании, были созданы компанией
, а само соревнование было спонсировано
Kia Motors
Robotics Studio 1.0 (Лицензии на коммерческое и некоммерческое использование)
Robotics Studio 1.5 (Лицензии на коммерческое и некоммерческое использование)
Robotics Studio 1.5 'Обновленная' (Лицензии на коммерческое и некоммерческое использование)
Robotics Developer Studio 2008 Standard Edition (Коммерческое использование), Academic Edition (Академическое использование) и Express Edition (Лицензии на коммерческое и некоммерческое использование) (Примечание: Express Edition не имеет
режима правки
в симуляции, редактор шаблонов поверхностей также имеет ограничения, присутствует ограничение до 64 сущностей, нет поддержки моделей
COLLADA
).
Обновление до 2008 R2
Обновление до 2008 R3 — Дата релиза:
20 мая
2010
. Вместе с выходом этой версии Robotics Developer Studio стала бесплатной, функциональность всех версий различных лицензий собрана в одно целое.
Robotics Studio 4 Обновлена симуляционная платформа, исправлены баги, добавлена новая документация.