Типы подводных лодок ВМФ СССР и России
- 1 year ago
- 0
- 0
Обнаружение подводных лодок — определение местоположения и параметров движения подводных лодок с использованием технических средств обнаружения . Является первой и главной задачей при борьбе с ними. Успешное обнаружение лишает подводные лодки главного тактического преимущества — скрытности.
Скрытность присуща подводной лодке изначально. Кроме того, при создании лодок принимаются все меры к повышению скрытности. Следовательно, обнаружение не бывает легкой задачей. С развитием техники оно становится только труднее. Поэтому на него тратится бо́льшая часть времени и средств .
Как и всякий предмет, лодка своим присутствием влияет на окружающую среду. Иными словами, лодка имеет собственные физические поля . К более известным физическим полям подводной лодки относятся гидроакустическое, магнитное, гидродинамическое, электрическое, низкочастотное электромагнитное, а также тепловое, оптическое. Выделение физических полей лодки на фоне полей океана (моря) лежит в основе главных способов обнаружения.
Способы обнаружения по типу физических полей:
Кроме того, имеются косвенные способы обнаружения:
Ни один отдельный способ не гарантирует обнаружения, и даже не гарантирует стабильного уровня работы. Поэтому все способы применяются совместно. Они постоянно исследуются и развиваются, и ведется поиск новых.

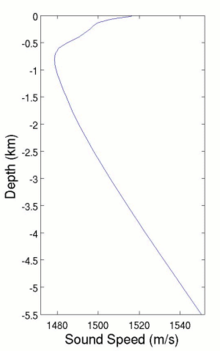
Акустический способ является первым по важности. Звук распространяется в воде гораздо быстрее, чем в воздухе (около 1500 м/с) и на расстояния много бо́льшие, чем любые другие возмущения. В среднем дальность обнаружения акустическим способом на два порядка превосходит следующий за ним магнитометрический способ. Акустика позволяет обнаруживать подводные лодки на всех глубинах , не зависит от времени суток и мало зависит от погодных условий и сезона. Однако дистанция, точность и сама надежность обнаружения сильно (в десятки раз) меняются в зависимости от гидрологических условий моря; например, наличие подводного звукового канала (на диаграмме) может резко повысить дальность обнаружения, наоборот, слой скачка служит барьером и может сделать лодку акустически «невидимой».
Пассивный способ представляет собой обнаружение шумов , и гидроакустических сигналов (последнее нехарактерно), издаваемых самой подводной лодкой. В зависимости от конкретного применяемого устройства его называют также шумопеленгацией, шумо-локацией, гидроакустическим наблюдением, или обнаружением кильватерного следа .
Достоинствами пассивного способа являются его скрытность — цель не знает о факте обнаружения, сравнительно большая дальность — в отдельных случаях сильно шумящие объекты обнаруживаются на дистанциях 100÷150 миль, — и возможность классификации целей по характеру шумов.
С целью классификации составляется так называемая акустическая сигнатура ( англ. acoustic profile ) цели. Она может включать: механические шумы, шумы оборудования, шумы обтекания, лопастной звук, звук на частоте вращения, кавитационный шум, шумы выступающих частей. Для подводных лодок самым шумящим объектом являются винты . Вторым по заметности (характерен для атомных ПЛ) — циркуляционный насос (ЦН) первого контура реактора. Акустические сигнатуры позволяют мино-торпедам «Кэптор» избирательно поражать только подводные лодки.
Недостатком пассивного способа является невозможность прямо определить дистанцию до цели: он дает только направление — пеленг на цель. Для определения дистанций в пассивном режиме приходится применять косвенные методы.
Пассивный способ является основным, применяемым подводными лодками и стационарными системами наблюдения. Он же является единственным в дежурном канале акустических систем наведения морского оружия — мин и торпед .

При активном способе гидроакустический приемник обнаруживает отраженный от цели звук ( эхо ), излучаемый синхронизированным передатчиком. Соответственно, способ называется еще эхо-пеленгованием или эхо-локацией . На таком принципе действуют гидролокаторы (ГАС) или радиогидроакустические буи ( ).
Достоинством активного способа является возможность непосредственно определять не только пеленг, но и дистанцию до цели.
Недостатками являются дальность обнаружения меньшая, чем пассивным способом — отраженный сигнал с расстоянием затухает ниже уровня полезного, а попытки увеличить дальность ведут к экспоненциальному росту интенсивности сигнала, которая ограничена технически; отсутствие скрытности обнаружения — подводная лодка слышит излучаемый сигнал на расстоянии примерно вдвое большем, чем поисковая ГАС слышит эхо; невозможность классификации целей — единственное, что можно достаточно надежно определить, это координаты цели.
По этим причинам активный способ характерен для: надводных кораблей, так как условия пассивного обнаружения для них ограничены собственными шумами; для радиогидроакустических буев и опускаемых ГАС; для подводных лодок, уточняющих элементы движения цели непосредственно перед атакой; и в боевом канале систем наведения морского оружия.



Магнитометрический способ основан на поиске искажений в магнитном поле Земли — магнитных аномалий . Присутствие больших масс ферромагнетиков , таких как корпус ПЛ, создает достаточно большие аномалии, чтобы их можно было обнаружить магнитометром .
Противолодочная индикаторная петля представляла собой подводный кабель, лежащий на морском дне и используемый для обнаружения прохода вражеских подводных лодок. Первое ее практическое применение было в Ферт-оф-Форте в августе 1915 года шотландским физиком Александром Крайтоном Митчеллом с помощью исследовательского учреждения Королевского флота в HMS Tarlair (Aberdour). К сожалению, его отчет в Совет по расследованию и исследованиям (СРиИ) был неправильно истолкован, и его выводы были отвергнуты как не имеющие значения. Ученый Уильям Брэгг из СРиИ проводил соответствующие исследования в СРиИ, но поскольку СРиИ не зависела от контроля Королевского флота , которого возмущал флот, он столкнулся с серьезными препятствиями, даже когда перешел в HMS Tarlair. Брэгг перебрался на экспериментальную станцию BIR в Харвич, Эссекс, Англия. По предложению Брэгга работы Митчелла были пересмотрены, интерес к петле Митчелла опять возрос в 1917 году, что привело к ее успешной разработке в середине 1918 года . Петли широко использовались союзниками во время Второй мировой войны для защиты портов от подводной атаки.
В чикагском Музее науки и промышленности , в разделе «подводные лодки» имеется экспозиция, где посетитель может поставить простой эксперимент. На фанерном планшете не нанесено ничего, кроме координатной сетки. Под планшетом имеется несколько железных предметов. Их число и места заранее неизвестны. Равномерно двигая по планшету магнит, можно определить координаты, в которых движение встречает сопротивление — координаты аномалий.
Среди противолодочных сил единственным носителем аэромагнитометров, или датчиков магнитных аномалий ( англ. Magnetic Anomaly Detector, MAD ), является авиация . При этом совершенство иных средств обнаружения, которыми пользуются американцы, таково, что вообще не имеет значения, есть у подлодки магнитное поле или нет; так, американцы вообще убрали со своих новых патрульных самолётов P-8 Poseidon магнитометры. Именно самолёты и вертолёты способны обследовать в короткий срок большие акватории, а их собственные магнитные поля невелики. Но даже при этом приходится выносить магнитометр подальше от корпуса. Поэтому противолодочный самолет узнаваем по жесткой хвостовой штанге, а вертолет по конусу-стабилизатору выпускаемого кабеля.
Достоинствами магнитометрического способа являются его простота и независимость от среды измерения — магнитное поле Земли в воде ведет себя почти так же, как в воздухе. Кроме того, способ пассивный, то есть цель не знает об обнаружении.
Основной недостаток — это малая дальность обнаружения. Магнитные аномалии быстро сглаживаются с расстоянием. Чтобы определить наличие аномалии, требуется проходить от неё не дальше чем в 1÷3 милях. При современных скоростях полета авиации, это означает практически прямо над лодкой. При этом чем ниже полет, тем легче заметить аномалию. Соответственно лодка, чтобы снизить вероятность обнаружения, может уходить на глубину.
Вода непроницаема для длин волн, используемых в радиолокации . Поэтому радиолокационное обнаружение подводных лодок возможно только когда какая-либо их часть находится над водой.
То есть, обнаружение ограничено в основном дизельными ПЛ в перископном положении. Атомные лодки могут не всплывать под перископ достаточно долго, чтобы избежать обнаружения. Это является основным недостатком данного способа.
С другой стороны, его достоинством является высокая точность. Современные РЛС способны обнаруживать выдвижные устройства ПЛ даже на фоне помех от волнения 2÷3 балла. Так, головки РДП обнаруживаются радаром на дистанциях 12÷15 миль, перископы на дистанциях 4÷5 миль, а радиопеленгаторы и антенны радиоразведки на 1÷2 милях.
Таким образом, радиолокация играет вспомогательную роль и используется для доразведки подводных лодок, ранее обнаруженных другими способами. Несмотря на это, радар является обязательной частью оборудования противолодочных сил.
Газоанализаторы обнаруживают присутствие в воздухе углеводородов, которые характерны для продуктов горения. Иначе говоря, присутствие дизельного выхлопа подводных лодок. Аппаратура, буквально, имитирует способности человеческого носа. В английском она прямо называется англ. sniffer — нюхатель.
Способ был изобретен союзниками и широко применялся во время Второй мировой войны . С развитием атомных ПЛ его значение уменьшилось. Тем не менее, он не вышел из употребления, потому что даже под РДП лодки производят достаточно выхлопа для обнаружения. Основным носителем газоанализаторов является авиация.
Очевидно, что этот способ пригоден только против подводных лодок, использующих дизеля. В этом его главный недостаток . Кроме того, его надежность сильно зависит от погодных условий — силы ветра, влажности и температуры.
Достоинство способа — его пассивный характер.
Обнаружение по тепловому следу — разновидность инфракрасного метода, нацеленная на обнаружение атомных ПЛ.
В качестве охладителя внешнего контура реакторы АПЛ используют забортную воду. После сброса обратно за борт вода оказывается теплее окружающей.
Способ получил распространение потому, что оставляемый лодкой тепловой след много больше по размерам чем сама лодка, и значит обнаруживается легче. Кроме того, след имеет свойство со временем подниматься к поверхности (одновременно размываясь и остывая). Вышедший на поверхность след обнаруживается даже из космоса. Но стойкость его невелика: меньше получаса.
Разница температур обычно недостаточна, чтобы обнаружить лодку с одного замера. Требуется сравнение и сопоставление многих замеров. Поэтому применение ограничено сетями специализированных РГАБ, космической разведкой и реже — системами стационарного наблюдения.
Достоинствами этого способа являются большая дальность и его пассивный характер.
Недостатками являются недостаточная надежность одиночного замера, неустойчивость к помехам и в результате ограниченный круг применения — только против атомных ПЛ.
Экспресс-метод обнаружения атомных подводных лодок по следам радионуклидов цезия в морской воде разрабатывался в 1980-х годах. Во второй половине 80-х годов в экспериментальном порядке методика использовалась в ВМФ СССР. Автор заявил внедрение. Системами обнаружения кильватерного следа (СОКС) были оснащены подводные лодки проекта 971 «Щука-Б» .
С повышением скрытности атомных ПЛ разница, например, температур охладителя и забортной воды уменьшилась настолько, что для имеющихся датчиков стала плохо различима на фоне помех. То же можно сказать о магнитной аномалии ПЛ с титановым корпусом.
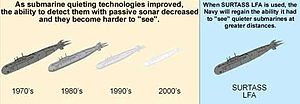
Поскольку заметного прироста чувствительности датчиков не ожидается, упор перенесен на комплексную обработку данных от нескольких способов обнаружения. Так, разница температур от охладителя дополняется разницей от перемешивания воды винтом , акустической сигнатуры кильватерного следа , электрического потенциала между верхней и нижней поверхностями корпуса лодки, и других. На первый план выходят мощность процессора сигналов и накопление данных наблюдения, для выделения цели на естественном фоне моря. Так, использование протяженной буксируемой антенны (ПБА) системы SURTASS , состоящей из многих гидрофонов, качественно повысило акустическую контрастность целей.
Практика показывает, что комплексные методы позволяют не только обнаруживать современные атомные ПЛ, но и поддерживать контакт.
Большую роль играли и играют косвенные методы обнаружения. Лодка не может постоянно держать наивысший уровень скрытности, так же как не может находиться под водой вечно. Рано или поздно она вынуждена обнаруживать себя. Все косвенные методы основаны на попытках предсказать место и время, когда лодка понизит скрытность, и этим воспользоваться.
Основными силами для обнаружения и уничтожения подводных лодок являются противолодочные самолёты и корабли , торпедные и многоцелевые подводные лодки, противолодочные вертолёты , а их средствами — датчики, основанные на перечисленных выше методах, и специализированные процессоры обработки информации.
Также в целях обороны противолодочное вооружение устанавливается на другие виды боевых кораблей и на стратегические подводные лодки.
В 2010 году в США Агентство передовых военных разработок Министерства обороны ( DARPA ) начало разработку проекта автономных противолодочных кораблей с полностью автоматическим управлением — ACTUV . В качестве основного средства обнаружения планируется использовать активную эхолокацию.
Само обнаружение ПЛ еще не гарантирует поражения. Чтобы противолодочные силы могли сблизиться и успешно атаковать, установленный контакт нужно поддерживать до их подхода. Из-за невысокой надежности всех методов поддержание контакта выливается в отдельную задачу, под названием слежение за подводными лодками .