Этот термин пришёл из
комплексного анализа
, изначально использовался только для конформных отображений областей плоскости.
Связанные определения
Если при конформном отображении сохраняется
ориентация
, то говорят о
конформном отображении первого рода
; если же она меняется на противоположную, то говорят о
конформном отображении второго рода
либо
антиконформном отображении
.
Две
метрики
на гладком многообразии
называются
конформноэквивалентными
если существует гладкая функция
такая что
. В этом случае функция
называется
конформным фактором
.
Свойства
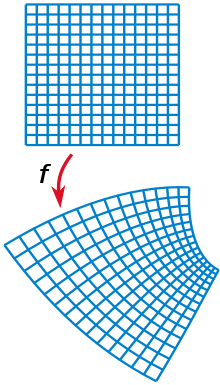
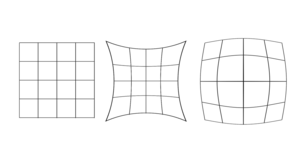
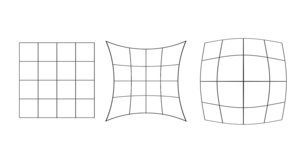
Пример конформного отображения. Видно, что перпендикулярность сохраняется.
Конформное отображение сохраняет форму бесконечно малых фигур;
Конформное отображение сохраняет
углы между кривыми
в точках их пересечения (
свойство сохранения углов
).
Это свойство можно также взять за определение конформного отображения.
Теорема Римана
: Любая
односвязная
открытая область в плоскости, отличная от всей плоскости, допускает конформную биекцию на единичный диск.
Алешков Ю. З.
Лекции по теории функции комплексного переменного, СПб.: изд-во СПбГУ, 1999;
Иванов В. И.
Конформные отображения и их приложения (краткий исторический очерк). //
Историко-математические исследования
. —
М.
: Янус-К, 2001. —
№ 41 (6)
. —
С. 255-266.
.
Янушаускас А. И.
Трёхмерные аналоги конформных отображений. Новосибирск: Наука, 1982. 173 с., 2650 экз.
Радыгин В. М.
,
Полянский И. С.
Методы конформных отображений многогранников в
// Вестн. Удмуртск. ун-та. Матем. Мех. Компьют. науки, 27:1 (2017), 60–68.





























![{\displaystyle {\tilde {K}}_{X,Y}=f^{2}{\cdot }K_{X,Y}+f{\cdot }[\mathrm {Hess} _{f}(X,X)+\mathrm {Hess} _{f}(Y,Y)]-|\nabla f|^{2},}](/images/005/727/5727681/31.jpg?rand=969182)