Interested Article - Аптечный робот
- 2021-02-24
- 2
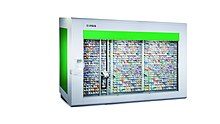
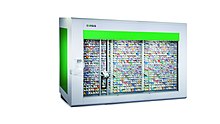
Аптечный робот (робот для аптеки) — мини-складское оборудование, которое устанавливается в аптеке , аптечных складах и медицинских учреждениях для оптимизации хранения, поиска и выдачи медикаментов к рабочему месту фармацевта (первому столу) или для продажи непосредственно покупателю .

История
Опираясь на потребность в автоматизации логистических процессов аптек с больши́м товарооборотом и проходимостью в аптеке, немецкие инженеры разработали робота, позволяющего экономить время на поиск лекарства на складе в пользу консультации покупателя. На выставке Expopharm в Мюнхене в 1996 году был представлен первый в мире робот-фармацевт для автоматизации выдачи наиболее востребованных медикаментов в аптеке. Позднее подобные системы стали внедряться в госпитальной и аптечной системе США .
Выделяют 4 типа роботов для аптек:
- автоматический диспенсер ( лат. dispensatio — раздача, разделение, распределение, раскладка);
- роботизированный склад;
- комбинированные решения;
- продающие роботы
По экспертной оценке компаний, занимающихся роботизацией аптек в Европе, на 2006 год уже автоматизированы 14 % аптек в Германии , 7 % аптек — во Франции, 3 % аптек — в Испании, 2 % аптек — в Италии.
Для России роботизация аптек — это относительно новое решение. Первый подобный робот марки CONSIS немецкой компании Willach был установлен в московской аптеке « Самсон-Фарма » в 2006 году. Немного позднее роботы той же модели появились в аптеках Республики Беларусь и на Украине .
На рынке Казахстана на 2017 год представлены 6 аптечных роботов итальянского производства компании «Tecnilab Group». Первый робот модели «TwinTec» был установлен в 2012 году в столице страны, г. Астана. Официальным представителем итальянской компании по производству робототехники на территории стран СНГ является ТОО «Aster Lab solutions» .
Существуют аптечные роботы российского производства для склада
, а также продающие роботы, в том числе
встраиваемые
,
позволяющие аптеке функционировать круглосуточно и являющиеся одним из средств автоматизации аптеки
Такие роботы выполняют все требования по хранению лекарств, обеспечивают ассортимент в тысячи наименований, аудио-видео связь с квалифицированным провизором, могут принимать оплату в любой форме,
распознавать возраст, паспорт, рецепт
.
В России использование роботов разрешено в помещениях аптек или лечебных учреждений . так как фармацевтическая деятельность лицензируется.
Основные функции аптечного робота
- хранение аптечных товаров: упаковок, блистеров, пакетов, флаконов…) в заданных условиях (диапазоне температуры и влажности),
- прием товаров на хранение
- пользовательский интерфейс для взаимодействия с оператором, обеспечивающий удобный поиск товаров по их названию, фармакологическим группам, коду, штрих-коду
- быстрая выдача выбранных товаров
Функциональная схема аптечного робота
Система хранения
Чаще всего используется схема хранения в виде этажерки с полками, на которых размещаются товары. В рабочем пространстве могут устанавливаться 2 этажерки, между которых расположен механизм перемещения.
Механизм перемещения
Механизм перемещения (манипулятор) включает каретку с закрепленным рабочим органом и привод.
Манипулятор обеспечивает перемещение товаров от места приема к месту хранения, а затем к месту выдачи. Плоская вертикальная рабочая зона, образованная вертикальной плоскостью этажерки для хранения товаров, определяет использования декартовой системы координат перемещения робота вдоль плоскости этажерки (2 степени подвижности) и смещение каретки с рабочим органом в горизонтальной плоскости внутрь этажерки (третья степень подвижности). Такая схема используется в плоттерах планшетного типа или режущих станках с ЧПУ (лазерных, фрезерных и т. д.). Если этажерки расположены с двух сторон от механизма перемещения, то каретка должна разворачиваться на 180 градусов (четвертая степень подвижности).
Для ускорения работы могут использоваться 2 механизма перемещения или более .
Некоторые производители аптечных роботов используют манипулятор в угловой системе координат с 6 степенями подвижности, недостатком которого является ограниченная рабочая зона, доступная манипулятору, расположенная вокруг него. Избыточность степени подвижности (6 вместо трех или четырех) невыгодна в финансовом плане.
Рабочий орган
В качестве рабочего органа робота обычно применяется установленный на каретке захват.
Привод
Чтобы получить высокую точность позиционирования каретки механизма перемещения обычно используют электрический привод с шаговыми двигателями для каждой степени подвижности, а также сенсорную систему, позволяющую системе управления рассчитывать и компенсировать ошибки перемещения. Шаговый двигатель поворачивается на угол в соответствии с количеством поданных на него импульсов, поступающих от электронных блоков (драйверов, контроллеров), входящих в систему управления. Усилие шагового двигателя, необходимое для перемещения товара и деталей механизма перемещения, зависит от его мощности, а также амплитуды и длительности (точнее скважности ) поданных на него импульсов. Благодаря программе системы управления, изменяющей параметры импульсов шаговых двигателей, достигается плавный разгон, быстрое перемещение каретки и плавный ее останов.
Сенсорная система
Сенсорная система содержит различные датчики, в первую очередь, датчики перемещения (угловые, линейные), обеспечивающие обратную связь в механизме перемещения. Показания датчиков отслеживаются системой управления.
Кроме того, для обеспечения распознавания фармпрепаратов могут использоваться датчики на рабочем органе, например, считыватель штрих-кода.
Система управления
Аптечные роботы по классификации промышленных роботов являются автоматическими интеллектуальными роботами с элементами программного, адаптивного управления и обучения. При приемке товара система управления распознает его название и выбирает место его хранения с учетом размещения одноименных или близких товаров (обучение и адаптация). Смещение каретки механизма перемещения производится по заранее созданной программе в зависимости от начальной и конечной точки перемещения.
Программное обеспечение
Параметры движения каретки робота, данные размещения товаров и информация о них (например, название, международное непатентованное название, фармгруппа, дженерики, правила хранения и употребления и т. д.) хранятся в базе данных, которая вместе с системой управления базами данных СУБД и программами управления механизмом перемещения составляет программное обеспечение (ПО) аптечного робота. Существенной частью ПО является интерфейс пользователя , предназначенный для взаимодействия человека с автоматической системой — аптечным роботом. В первую очередь, это взаимодействие покупателя с продающим аптечным роботом, осуществляемое обычно через сенсорный видеомонитор. Аналогично осуществляется взаимодействие персонала (провизора или фармацевта, оператора). Дополнительно используется удаленный контроль робота. Исполнителем программного обеспечения являются управляющие компьютеры и микропроцессоры, входящие в состав системы управления.
- Функционирование аптечного робота
-
 Сканирование упаковки перед складированием
Сканирование упаковки перед складированием -
 Заказ препарата с кассового автомата
Заказ препарата с кассового автомата -
 Манипулятор выбирает препарат
Манипулятор выбирает препарат -
 Манипулятор снимает препарат с конвейера
Манипулятор снимает препарат с конвейера -
 Аптечный робот группы компаний Инфотехника
Аптечный робот группы компаний Инфотехника -
 Интерфейс пользователя продающего аптечного робота для выбора препарата, новинки
Интерфейс пользователя продающего аптечного робота для выбора препарата, новинки -
 ..., описание препарата
..., описание препарата
Примечания
- ↑ Шаг в будущее // Фармацевтическое обозрение : журнал. — 2006. — № 11 . — С. 26 .
- ↑ // Рязанская газета : газета. — 2015. — № 12(69) . — С. 6 . 9 марта 2018 года.
- // . — US: Jones & Bartlett Learning, 2004. — С. . — ISBN 0763731447 .
- TECNILAB1970. (24 февраля 2012). Дата обращения: 14 апреля 2017. 12 апреля 2021 года.
- . www.asterlab.kz. Дата обращения: 14 апреля 2017. Архивировано из 15 апреля 2017 года.
- Infotechnica. (14 апреля 2016). Дата обращения: 9 марта 2018.
- Infotechnica. (1 октября 2015). Дата обращения: 9 марта 2018. 12 июня 2019 года.
- Даная. (2001). Дата обращения: 9 марта 2018. 10 марта 2018 года.
- Инфотехника. (2017). Дата обращения: 9 марта 2018. 9 марта 2018 года.
- МИНИСТЕРСТВО ЗДРАВООХРАНЕНИЯ И СОЦИАЛЬНОГО РАЗВИТИЯ РФ. : приказ. — 26 августа 2010 года. — № 735н . 9 марта 2018 года.
- Корецкий А. В., Созинова Е. Л. . / Под ред. М. Н. Кирсанова. — М. : ИНФРА-М, 2015. — 120 с. — (Научная мысль). — ISBN 978-5-16-011287-9 . 4 декабря 2021 года. — С. 90—99.
См. также
Литература
- Иванов А. А. Основы робототехники. 2-е изд. — М. : ИНФРА-М, 2017. — 223 с. — ISBN 978-5-16-012765-1 .
- Медведев В. С., Лесков А. Г., Ющенко А. С. Системы управления манипуляционных роботов. — М. : Наука , 1978. — 416 с. — (Научные основы робототехники).
- Попов Е. П., Письменный Г. В. Основы робототехники: Введение в специальность. — М. : Высшая школа , 1990. — 224 с. — ISBN 5-06-001644-7 .
- Зенкевич С. Л., Ющенко А. С. Основы управления манипуляционными роботами. 2-е изд. — М. : Изд-во МГТУ им. Н. Э. Баумана, 2004. — 480 с. — ISBN 5-7038-2567-9 .
- Воротников С. А. Информационные устройства робототехнических систем. — М. : Изд-во МГТУ им. Н. Э. Баумана, 2005. — 384 с. — ISBN 5-7038-2207-6 .
- Квинт В. Л. Промышленные роботы: классификация, внедрение, эффективность. — Знание , 1978. — 32 с.
- Александра Демецкая, канд. биол. наук // Фармацевт-практик, Украина. — 2014. — № 22.09 .
Ссылки
- 2021-02-24
- 2