Interested Article - Кватернионы и вращение пространства
- 2021-02-20
- 1
Кватернионы предоставляют удобное математическое обозначение ориентации пространства и вращения объектов в этом пространстве.
В сравнении с углами Эйлера кватернионы позволяют проще комбинировать вращения, а также избегают проблемы, известной как складывание рамок : при тангаже 90° крен и курс — одно и то же движение.
В сравнении с матрицами поворота они не страдают от (любой ненулевой кватернион превращается в кватернион вращения простым нормированием), позволяют анимировать поворот кратчайшим путём без побочных эффектов вроде «конфетного фантика», и могут быть более эффективными.
Кватернионы нашли своё применение в компьютерной графике , робототехнике , навигации , молекулярной динамике .
Операции вращения
Представление пространства вращения
Кватернионы единичной нормы , согласно Гамильтону называемые также версорами ( англ. versors ), предоставляют алгебраический способ представления вращения в трёх измерениях. Соответствие между вращениями и кватернионами в первую очередь может быть осознано через само пространство вращения — группу SO(3) .
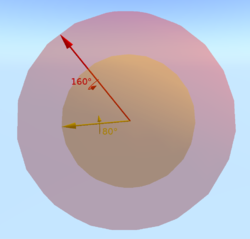
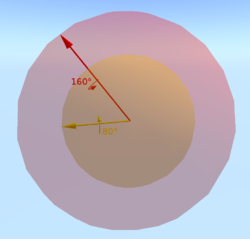
Любое вращение в трёхмерном пространстве — это вращение на определённый угол вокруг определённой оси. Если угол равен нулю, то выбор оси не имеет значения; таким образом, вращения на угол 0° — это точка в пространстве вращения ( тождественное вращение). Для крошечного (но ненулевого) угла каждое возможное вращение на этот угол — это маленькая сфера , окружающая тождественное вращение, где каждая точка на этой сфере представляет собой ось, указывающую в определённом направлении (можно сравнить с небесной сферой ). Чем больше угол вращения, тем дальше вращение от тождественного вращения; о таких вращениях можно думать как о концентрических сферах с увеличивающимся радиусом. Таким образом, вблизи тождественного вращения абстрактное пространство вращений выглядит как обычное трёхмерное пространство (которое также можно представить как центральную точку, окружённую концентрическими сферами). При увеличении угла до 360° вращения вокруг различных осей перестают расходиться и начинают становиться похожими друг на друга, становясь равными тождественному вращению, когда угол достигает 360°.
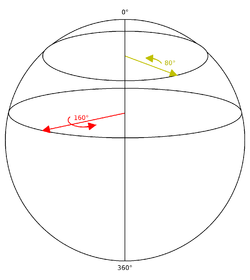
Мы можем увидеть похожее поведение на поверхности сферы. Если мы расположимся на северном полюсе и начнём чертить прямые линии, исходящие из него в различных направлениях (то есть линии долготы ), то сначала они будут расходиться, но затем снова сойдутся на южном полюсе. Концентрические круги, получившиеся вокруг северного полюса ( широты ), стянутся в одну точку на южном полюсе — когда радиус сферы сравняется с расстоянием между полюсами. Если думать о разных направлениях из полюса (то есть разные долготы) как о разных осях вращения, а о разных расстояниях от полюса (то есть широтах) как о разных углах вращения, то мы получим пространство для вращений. Получившаяся сфера представляет вращение в трёхмерном пространстве, хотя является двухмерной поверхностью, что не позволяет смоделировать гиперсферу . Однако двухмерную поверхность сферы можно представлять как часть гиперсферы (как окружность является частью сферы). Мы можем взять часть, например, для представления вращения вокруг осей в плоскости xy . Важно отметить, что угол вращения до экватора равен 180° (а не 90°); до южного полюса (с северного) 360° (а не 180°).
Северный и южный полюс представляют одинаковые вращения. Это справедливо для двух любых диаметрально противоположных точек: если одна точка — это вращение на угол вокруг оси v , то диаметрально противоположной является точка с вращением на угол вокруг оси − v . Таким образом, пространство вращений является не самой 3-сферой , а 3- полу сферой ( шаром на ней радиуса ) с отождествлёнными диаметрально противоположными точками, что диффеоморфно проективному пространству . Однако для большинства целей можно думать о вращениях как о точках на сфере несмотря на то, что они обладают двойной избыточностью.




Определение пространства вращения
Координаты точки на поверхности сферы можно задать двумя числами, например широтой и долготой. Однако такая координата, как долгота, на северном и южном полюсах начинает вести себя неопределённо (проявляет вырожденность ), хотя северный и южный полюса принципиально не отличаются от любой другой точки поверхности сферы. Это показывает, что ни одна координатная система не может двумя координатами охарактеризовать положение в пространстве. Этого можно избежать, поместив сферу в трёхмерное пространство, охарактеризовав её декартовыми координатами ( w , x , y ), помещая северный полюс на ( w , x , y ) = (1, 0, 0), южный полюс на ( w , x , y ) = (−1, 0, 0), а экватор на w = 0, x ² + y ² = 1. Точки на сфере удовлетворяют отношению w ² + x ² + y ² = 1. В итоге получаются две степени свободы , хотя имеется три координаты. Точка ( w , x , y ) представляет вращение вокруг оси ( x , y , 0) на угол .

Таким же образом пространство трёхмерных вращений может быть охарактеризовано тремя углами ( углами Эйлера ), однако любое такое представление начинает вырождаться на некоторых точках гиперсферы. Этой проблемы можно избежать, используя евклидовы координаты w , x , y , z , где w ² + x ² + y ² + z ² = 1. Точка ( w , x , y , z ) представляет вращение вокруг осей ( x , y , z ) на угол

Коротко о кватернионах
Комплексное число может быть определено введением абстрактного символа i , который удовлетворяет обычным правилам алгебры, а также правилу . Этого достаточно для воспроизведения всех правил арифметики комплексных чисел. Например:

- .

Таким же образом кватернионы могут быть определены введением абстрактных символов i , j , k , умножение которых задаются по правилу




а умножение на вещественные числа определяются обычным образом, причём умножение полагается ассоциативным , но не коммутативным (примером некоммутативного умножения является также умножение матриц ). Из этого следуют все правила кватернионной арифметики, например
- .

Мнимая часть кватерниона ведёт себя так же, как и вектор , а вещественная часть a ведёт себя так же, как и скаляр в . При использовании кватернионов можно, следуя Гамильтону, описывать их как сумму скаляра и вектора и использовать векторное и скалярное произведения и (идея которых была подсказана кватернионами). При этом они связаны с обычным кватернионным умножением следующей формулой:





- .

Векторное произведение некоммутативно, а произведения скаляр—скаляр и скаляр—вектор коммутативны. Из этих правил следует:
- .

Обратным (слева и справа) для ненулевого кватерниона является

- ,

что может быть проверено прямым вычислением.
Определение пространства вращения через кватернионы
Допустим ( w , x , y , z ) — координаты вращения, согласно прежнему описанию. Тогда кватернион q можно определить как
- ,

где — единичный вектор. Таким образом, произведение


вращает вектор на угол вокруг оси заданной вектором . Вращение происходит по часовой стрелке , если рассматривать вращение по направлению вектора ; то есть, направление вектора совпадает с направлением поступательного движения правого винта , когда он проворачивается на положительный угол .






Можно взять композицию вращений на кватернионы, перемножив их (от порядка умножения зависит порядок вращения). Таким образом, вращения на кватернионы и равно



что то же самое, что и вращение на , а затем на .


Обращение кватерниона — это то же, что и вращение в противоположном направлении, таким образом . Квадрат кватерниона — это вращение на двойной угол вокруг той же оси. В общем смысле, — это вращение вокруг оси на угол в раз больший первоначального. Вместо может быть любое вещественное число [ источник не указан 3248 дней ] , позволяя использовать кватернионы для плавной интерполяции между двумя положениями в пространстве.





Вращение на единичный кватернион
Пусть u — это единичный вектор (ось вращения), а кватернион. Наша цель — показать, что


вращает вектор v на угол α вокруг оси u . Раскрыв скобки, получаем:

где и — это компоненты вектора v , которые перпендикулярны и параллельны оси u , соответственно.


Получившийся результат является формулой вращения на угол α вокруг оси u .
Умножение вектора на −1 , то есть взятие противоположного кватерниона, не изменяет вращение. В частности, кватернионы 1 и −1 оба определяют тождественное вращение. Более абстрактно, векторы принадлежат группе Ли SU(2) , диффеоморфной 3-сфере. Эта группа двукратно накрывает пространство вращений SO(3).
Вращение четырёхмерного евклидова пространства
Четырёхмерное вращение описывается двумя кватернионами единичной нормы, с точностью до умножения обоих одновременно на −1.
Вариации и обобщения
Похожие формулы позволяют применить бикватернионы для описания преобразований Лоренца — «вращений» 4-мерного пространства Минковского .
См. также
Примечания
- Rotations, Quaternions, and Double Groups / Altmann, Simon L. — Mineola: Dover Publications, 1986. — 317 p.
Литература
- В. И. Арнольд. . — М. : МЦНМО , 2002. — 40 с. — ISBN 5-94057-025-9 .
- И. Л. Кантор, А. С. Солодовников (недоступная ссылка) . — М.: Наука , 1973. — 144 с.
Ссылки
- от 25 февраля 2009 на Wayback Machine
- от 27 сентября 2007 на Wayback Machine
- от 30 декабря 2013 на Wayback Machine
- от 19 апреля 2014 на Wayback Machine
- // Большая советская энциклопедия : в 66 т. (65 т. и 1 доп.) / гл. ред. О. Ю. Шмидт . — М. : Советская энциклопедия , 1926—1947.
- 2021-02-20
- 1