Посейдон (подводный аппарат)
- 1 year ago
- 0
- 0



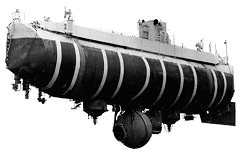
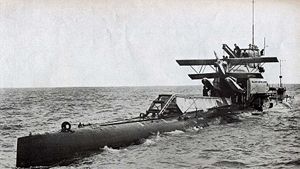
Автономный необитаемый подводный аппарат (АНПА , англ. AUV — autonomous underwater vehicle ) — плавучий объект , подводный робот , напоминающий торпеду или подводную лодку , перемещающийся под водой с целью сбора информации о рельефе дна, о строении верхнего слоя осадков, о наличии на дне предметов и препятствий. Питание аппарата осуществляется от аккумуляторов или другого типа батарей. Некоторые разновидности АНПА способны погружаться до глубины 6000 м. АНПА используются для площадных съёмок, для мониторинга подводных объектов, например трубопроводов, поиска и обезвреживания подводных мин.
АНПА представляют собой особый класс подводно-технических средств (ПТС) с присущими только им функциональными и конструктивными особенностями. Создание и разработка АНПА является сложно реализуемой задачей ввиду выдвигаемых противоречивых требований по использованию и эксплуатации аппаратов данного типа. Например, необходимо обеспечить длительную автономность аппарата за счет использования достаточного количества энергоносителей, но при этом соблюсти ограничение по весу.
Основные задачи, решаемые при помощи АНПА:
С конца XX века процессы разработки и эксплуатации АНПА активно используются в образовании. Существует ряд международных соревнований среди АНПА:
| Типы подводных роботов | |
|---|---|
| Известные подводные роботы | |