Электродвигатель постоянного тока
- 1 year ago
- 0
- 0

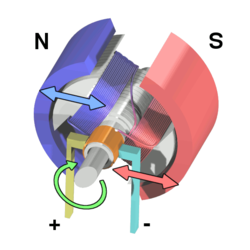
Ша́говый электродви́гатель — синхронный бес щёточный электродвигатель с несколькими обмотками, в котором ток, подаваемый в одну из обмоток статора , вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения (шаги) ротора .



Первые шаговые двигатели появились в 1830-х годах и представляли собой электромагнит, приводящий в движение храповое колесо. За одно включение электромагнита храповое колесо перемещается на величину зубцового шага храпового колеса. Храповые шаговые двигатели и в настоящее время находят довольно широкое применение .
Конструктивно шаговые электродвигатели состоят из статора , на котором расположены обмотки возбуждения, и ротора, выполненного из магнитомягкого или магнитотвёрдого материала. Шаговые двигатели с магнитным ротором позволяют получать больший крутящий момент и обеспечивают фиксацию ротора при обесточенных обмотках.
Таким образом по конструкции ротора выделяют следующие разновидности шагового двигателя :
Гибридные двигатели сочетают в себе лучшие черты двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами.
Статор гибридного двигателя также имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки. Обычно используются 4 основных полюса для 3,6-градусных двигателей и 8 основных полюсов для 1,8—0,9-градусных двигателей. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определённых положениях ротора, что улучшает статический и динамический момент. Это обеспечивается соответствующим расположением зубцов, когда часть зубцов ротора находится строго напротив зубца, а часть — между ними.
Ротор гибридного двигателя имеет зубцы, расположенные в осевом направлении. Ротор разделён на две части, между которыми расположен цилиндрический постоянный магнит. Таким образом, зубцы верхней половинки ротора являются северными полюсами, а зубцы нижней половинки — южными. Кроме того, верхняя и нижняя половинки ротора повёрнуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок. Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи.

В машиностроении наибольшее распространение получили высокомоментные двухфазные гибридные шаговые электродвигатели с угловым перемещением 1,8°/шаг (200 шагов/оборот) или 0,9°/шаг (400 шаг/об). Точность выставления шага определяется качеством механической обработки ротора и статора электродвигателя . Производители современных шаговых электродвигателей гарантируют точность выставления шага без нагрузки до 5 % от величины шага.
Дискретность шага создаёт существенные вибрации, которые в ряде случаев могут приводить к снижению крутящего момента и возбуждению механических резонансов в системе. Уровень вибраций удаётся снижать при использовании режима дробления шага или при увеличении количества фаз .
Режим дробления шага (микрошаг) реализуется при независимом управлении током обмоток шагового электродвигателя. Управляя соотношением токов в обмотках, можно зафиксировать ротор в промежуточном положении между шагами. Таким образом можно повысить плавность вращения ротора и добиться высокой точности позиционирования. Качество изготовления современных шаговых двигателей позволяет повысить точность позиционирования в 10—20 раз.
Шаговые двигатели стандартизованы (NEMA) по посадочным размерам и размеру фланца: NEMA 17, NEMA 23, NEMA 34 и др. — размер фланца 42, 57, 86 и 110 мм соответственно. Шаговые электродвигатели NEMA 23 могут создавать крутящий момент до 30 кгс⋅см, NEMA 34 — до 120 кгс⋅см и до 210 кгс⋅см для двигателей с фланцем 110 мм.

Шаговые двигатели создают сравнительно высокий момент при низких скоростях вращения. Момент существенно падает при увеличении скорости вращения. Однако, динамические характеристики двигателя могут быть существенно улучшены при использовании драйверов со стабилизацией тока на основе ШИМ .
Шаговые электродвигатели применяются в приводах машин и механизмов, работающих в старт-стопном режиме, или в приводах непрерывного движения, где управляющее воздействие задаётся последовательностью электрических импульсов, например, в станках с ЧПУ . В отличие от сервоприводов , шаговые приводы позволяют получать точное позиционирование без использования обратной связи от датчиков углового положения.
Шаговые двигатели применяются в устройствах компьютерной памяти — НГМД , НЖМД , устройствах чтения оптических дисков .
Шаговые двигатели с постоянными магнитами могут использоваться в качестве датчиков угла поворота благодаря возникновению ЭДС на обмотках при вращении ротора. При этом, несмотря на удобство пользования и хорошую точность и повторяемость, необходимо учитывать, что:
Главное преимущество шаговых приводов — точность. При подаче потенциалов на обмотки шаговый двигатель повернётся строго на определённый угол. Стоимость шаговых приводов в среднем в 1,5—2 раза ниже сервоприводов . Шаговый привод, как недорогая альтернатива сервоприводу, наилучшим образом подходит для автоматизации отдельных узлов и систем, где не требуется высокая динамика. Можно отметить также длительный срок службы, порой сравнимый со временем морального устаревания или выработки ресурса всего станка; точность работы ШД за это время падает незначительно. Нетребовательны к техобслуживанию.
Возможность «проскальзывания» ротора — наиболее известная проблема этих двигателей. Это может произойти при превышении нагрузки на валу, при неверной настройке управляющей программы (например, ускорение старта или торможения не адекватно перемещаемой массе), при приближении скорости вращения к резонансной. Наличие датчика позволяет обнаружить проблему, но автоматически скомпенсировать её без остановки производственной программы возможно только в очень редких случаях [ источник не указан 3844 дня ] . Чтобы избежать проскальзывания ротора, как один из способов, можно увеличить момент двигателя.
|
||||||||||||||||||
|
||||||||||||||||||
|
||||||||||||||||||
|
||||||||||||||||||
|
||||||||||||||||||
|
||||||||||||||||||
|
||||||||||||||||||