Коломийцев в полный рост
- 1 year ago
- 0
- 0


Полный привод — разноплановый комплекс технических решений, обеспечивающий автомобилю постоянную или как минимум временную возможность иметь ведущими все свои колёса. Обоснованием применения полного привода на автомобиле является то, что полноприводной автомобиль может реализовывать в силу тяги всю доступную ему мощность при гораздо меньших силах сцепления, действующих на колёса, что напрямую сказывается на улучшении внедорожных и всепогодных способностей автомобиля. В случае одного двигателя идея полного привода реализуется только посредством полноприводных трансмиссий различных схем, каждая из которых подразумевает свои уникальные правила раздачи мощности между осями. В случае нескольких двигателей идея полного привода может быть реализована посредством раздельного (не связанного друг с другом) привода осей.
2×2 , 3x3, 4×4 , 6×6 , 8×8 , 12×12 , 24×24 , 4WD , AWD (All-wheel drive), Four-wheel drive и т. п.
До 1980-х годов полный привод ассоциировался почти исключительно с вездеходами, а полноприводные автомобили как правило имели увеличенные дорожный просвет и другие атрибуты повышенной проходимости.
Однако после появления систем полного привода на обычных автомобилях, без основной задачи повышения проходимости, на мелкосерийный в 1960-х , на серийные Audi с 1980-го, и ряда аналогичных систем у других компаний, привод на все колёса стал рассматриваться и как средство повышения ходовых качеств. В этом случае обеспечивается наиболее эффективное использование мощности двигателя при любом режиме движения, улучшается устойчивость при прохождении виражей, особенно на скользких покрытиях .
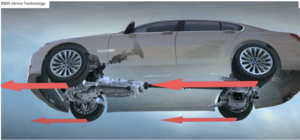
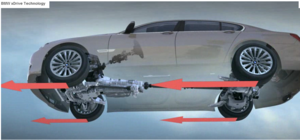
Именно с этими целями полный привод используется на спортивных автомобилях, например, Lamborghini Murciélago и некоторых моделях Porsche , широко распространён на автомобилях Subaru , а также на представительских автомобилях для повышения уровня активной безопасности — примеры такого использования включают системы 4Matic (на автомобилях Mercedes Benz ), xDrive ( BMW ), XWD ( Saab ), AWD ( Volvo ), 4 Motion ( Volkswagen ), а из российских разработок — трансмиссию малосерийной представительской «Волги» ГАЗ-3105 и представительского проекта « Кортеж ».
Полный привод как потенциальная возможность реализации избыточной мощности в условиях невысокой массы автомобиля, неразвитой аэродинамики и отсутствия подходящих шин.
Схема трансмиссии полноприводного автомобиля...



Большая часть полноприводных автомобилей — переднемоторные, которые являются производными от переднемоторных задне- и переднеприводных . Подобная компоновка является самой целесообразной для грузовых автомобилей повышенной проходимости, пикапов и SUV : она обеспечивает их сцепление, не жертвуя ни перевозимым грузом, ни пассажирскими сиденьями. На основе переднеприводных легковых автомобилей многие фирмы, особенно японские (родоначальником в 1971 году стала фирма Subaru ), выпускают версии с приводом на заднюю ось (как отключаемым, так и постоянно включённым). Встречаются модели как с продольным расположением двигателя, например, Subaru Leone , Audi Quattro и т.д., так и с поперечным (представлены в настоящее время в большинстве случаев). Штатная коробка передач переднеприводного автомобиля (как механическая, так и автоматическая) изменена, установлен редуктор отбора мощности к задней оси, крутящий момент передаётся через карданный вал на заднюю ось. Дифференциал с блокировкой (если он есть, на моделях с постоянным приводом) находится в картере коробки передач. На автомобилях с отключаемой задней осью подключение её производится или рычагом, или кнопкой (вакуумный сервопривод с электрическим управлением). Многие легковые автомобили с полным приводом имеют защиту поддона картера двигателя, дорожный просвет не увеличен в сравнении с переднеприводной моделью (используются одни и те же детали подвески).

Из советских легковых автомобилей эту компоновку имели автомобили ЛуАЗ-967 и ЛуАЗ-969 , на них устанавливался двигатель воздушного охлаждения автомобилей «Запорожец» , изменённая коробка передач имела подключаемый вал отбора мощности к задней оси. Однако эти автомобили изначально относились к категории внедорожников .

Одновременно самая первая и самая редкая в настоящее время компоновка полного привода. Первым полноприводным автомобилем в истории является Spyker 60 HP, выпущенный в 1903 году.

В 1966 году впервые начал серийно выпускаться легковой автомобиль (и первый серийный спорткар в частности), в котором полный привод применялся не для повышения проходимости, а для улучшения ходовых качеств на дорогах с твёрдым покрытием, не случайно эксперты-современники признали самой безопасной машиной в мире с точки зрения управляемости .


До 2010-х существовало небольшое количество моделей полноприводных автомобилей с заднемоторной компоновкой , например, фургоны и микроавтобусы Subaru Sambar/Domingo, малотоннажные грузовики (грузоподъёмностью около 500 кг) других японских фирм, например, Honda . Основной привод на заднюю ось, коробка передач объединена с главной передачей. Привод на переднюю ось отключаемый или постоянно включён. Доступ к двигателю происходит через откидной задний бампер или через разбираемый пол в салоне микроавтобуса. Подвеска колёс независимая.

В Австрии фирма Steyr по заказу VAG выпускала в 1985-1992 гг. полноприводную версию Syncro заднемоторного микроавтобуса Volkswagen Transporter T3. С конца 1980-х модель Transporter Syncro предлагалась ещё и в кузовах фургон и пикап, а также премиальных исполнениях Caravelle и Carat.
Некоторые колёсные бронированные машины также имеют заднее расположение двигателя (например, БРДМ-2 , БТР-60 ), но в их конструкции используются агрегаты от «классических» грузовых полноприводных автомобилей (двигатель с коробкой передач, раздаточная коробка).

Под схемой ПП подразумевается то, каким образом передняя и задняя ведущая оси включены в раздачу мощности от двигателя. Выбор той или иной схемы для конкретного ТС определяется многими факторами: конструкцией шасси и способом поворота, областью предполагаемой эксплуатации, конструкторскими предпочтениями, ценой. Применение ПП всегда ставит перед конструктором задачу, как и чем на разрабатываемом ТС будет обеспечиваться возможность вращения ведущих осей с разными угловыми скоростями, что в свою очередь проистекает из-за факта того, что на всех ТС за исключением тракторов со складываемыми полурамами колёса передней и задней оси в повороте катятся по разным радиусам. Даже на ТС с полноуправляемым шасси колёса передней и задней оси обычно отклоняются на разные углы для поворота, а абсолютно подавляющее большинство ТС имеют как управляемые (обычно передние), так и неуправляемые оси, что при движении на дуге предполагает их неравную частоту вращения. У каждой схемы ПП имеется свой уникальный способ решения задачи обеспечения разноскоростного вращения осей в поворотах, предполагающий определённый набор конструкторских решений и используемых механических передач вращения. В некоторых случаях решением этой задачи вообще пренебрегают, и это тоже является одной из схем ПП.
Существуют механические и автоматические(по другому электронные) схемы полного привода: К механическим схемам относятся подключаемый полный привод ( part-time ), постоянный полный привод ( full-time ), к автоматическим схемам относятся постоянный по требованию полный привод ( on-demand full-time ) и многорежимный полный привод ( selectable ). На одной и той же модели ТС на разных модификациях могут применяться разные схемы (типичный пример — Jeep Wrangler).

Самая простая и в то же время самая надёжная схема полного привода: при нормальной эксплуатации крутящий момент передаётся только на одну ось (переднюю или заднюю, в зависимости от модели и конструкции), а при необходимости подключается вторая ось (также переднюю или заднюю, в зависимости от модели и конструкции) — с помощью раздаточной коробки . При подключении о́си жёстко связываются между собой и вращаются с одинаковой скоростью, что создаёт некоторые ограничения: полный привод можно использовать только на покрытиях, допускающих проскальзывание колёс (грязь, песок, снег, лёд и т. п.). Какие колёса будут пробуксовывать — передние или задние — это зависит от нагрузки на ось в данный момент.
При жёсткой связи ведущих мостов в трансмиссии может возникнуть циркуляция мощности (ЦМ). При повороте циркулирующая мощность может быть значительной. ЦМ не используется для преодоления сил сопротивления движению автомобиля, дополнительно нагружает механизмы трансмиссии и шины, вызывая их повышенный износ. Кроме того, из-за увеличения суммарной мощности, передаваемой через механизмы трансмиссии, возрастают потери мощности в трансмиссии на буксовании колёс, увеличивая расход топлива и износ деталей двигателя. Поэтому ЦМ является вредной, и её часто называют паразитной мощностью. Чтобы уменьшить дополнительное изнашивание механизмов трансмиссии, шин и расход топлива, вызванных ЦМ и перераспределением крутящего момента, при раздаточной коробке с блокированным приводом необходимо включать второй ведущий мост только для повышения проходимости и устойчивости автомобиля. При движении по хорошим дорогам необходимо принудительное отключение второго ведущего моста для устранения циркуляции мощности или перераспределения крутящего момента.
Таким образом, основной недостаток подключаемого полного привода проявляется при перемещении по поверхности с часто меняющимися свойствами — асфальт с пятнами льда или снега, твёрдый грунт с участками грязи и т. д. Необходимо либо постоянно подключать и затем выключать второй мост (что иногда сопряжено с определёнными сложностями в зависимости от реализации способа подключения моста), либо перемещаться в обычном режиме, рискуя застрять, либо перемещаться на полном приводе, изнашивая трансмиссию циркуляциями мощности на хороших участках дороги.

Данная система полного привода предполагает постоянное подключение всех осей автомобиля к раздаче крутящего момента от двигателя. Главные передачи осей здесь получают крутящий момент от коробки передач через специфический элемент любой подобной трансмиссии — межосевой дифференциал. В случае двухосного автомобиля межосевой дифференциал один, в случае трёхосного — два, в случае четырёхосного — три, и т. д., причём, ветвление потоков через дифференциалы всегда происходит наподобие двоичного дерева . Независимо от общего числа ведущих осей система способна работать в чисто механической реализации без какой-либо управляющей электроники.





.jpg)
Данная система полного привода предполагает одну постоянно ведущую ось и одну автоматически подключаемую к раздаче крутящего момента, что делает подключаемую ось ведущей лишь по мере необходимости (отсюда англоязычное обозначение системы «AWD on-demand») и лишь в случаях, когда постоянно ведущая ось оказывается не способна реализовать весь доступный крутящий момент в силу тяги автомобиля. За передачу крутящего момента на подключаемую ось здесь всегда отвечает управляемая или самодействующая механическая муфта . Каноническим случаем современного применения системы являются переднемоторные легковые автомобили с постоянно ведущей передней осью и подключаемой задней (в т. ч. спортивные автомобили категории WRC), но вообще система может применяться на легковых автомобилях любой компоновки (например, BMW и Jeep классической компоновки с подключаемой передней осью, или Audi, Lamborghini и Porsche средне- и заднемоторной компоновки). Также система применяется на сельскохозяйственных колёсных тракторах с автоматически подключаемой передней осью на колёсах малого диаметра, хотя формально трансмиссии тракторов не подпадают под классификатор систем полного привода автомобилей.




В другую категорию можно выделить автомобили Mitsubishi Pajero (трансмиссия Super Select 4WD) и Jeep Grand Cherokee (трансмиссия Selec-Trac), Nissan Pathfinder (All-mode 4WD) с их селективной трансмиссией, которую можно назвать системой постоянного полного привода (автоматически подключаемого в случае с Nissan Pathfinder) с возможностью принудительного отключения переднего моста.
В Pajero, например, можно выбрать один из следующих режимов: 2WD, 4WD с автоматической блокировкой центрального дифференциала (аналогично Full-Time 4WD), 4WD с жёстко заблокированным дифференциалом (аналогично Part-Time 4WD) и пониженная передача (Low range Part-Time 4WD).
Предполагает одну ведущую ось с приводом от двигателя внутреннего сгорания через трансмиссию по типу моноприводного автомобиля и одну ведущую ось с приводом от тягового электродвигателя (система e.4WD ). В зависимости от мощности тягового электродвигателя таковой может получать питание как от штатной 12-вольтовой электросистемы и работать только при заведённом двигателе внутреннего сгорания, так и от тяговой батареи и работать в таком случае независимо от двигателя внутреннего сгорания.





| Компоновки | |
|---|---|
| Расположение двигателя | |
| Ведущие колёса | |
|
|
|
|---|---|
| В библиографических каталогах |
|
|
|
Для улучшения этой статьи
желательно
:
|