Ультразвуковой двигатель
- 1 year ago
- 0
- 0

Ультразвуково́й дви́гатель ( Ультразвуковой мотор , Пьезодвигатель , Пьезомагнитный двигатель , Пьезоэлектрический двигатель ), ( англ. USM — Ultra Sonic Motor, SWM — Silent Wave Motor, HSM — Hyper Sonic Motor, SDM — Supersonic Direct-drive Motor и др.) — двигатель, в котором рабочим элементом является пьезоэлектрическая керамика , благодаря которой он способен преобразовать электрическую энергию в механическую с очень большим КПД , превышающим у отдельных видов 90 %. Это позволяет получать уникальные приборы, в которых электрические колебания прямо преобразуются во вращательное движение ротора , при этом крутящий момент , развиваемый на валу такого двигателя столь велик, что исключает необходимость применения какого-либо механического редуктора для повышения крутящего момента. Также данный двигатель обладает выпрямительными свойствами гладкого фрикционного контакта. Эти свойства проявляются и на звуковых частотах. Такой контакт является аналогом электрического выпрямительного диода. Поэтому ультразвуковой двигатель можно отнести к фрикционным электромоторам.
В 1947 году были получены первые керамические образцы титаната бария и, уже с этого времени производство пьезоэлектрических моторов стало теоретически возможным. Но первый такой мотор появился лишь спустя 20 лет. Изучая пьезоэлектрические трансформаторы в силовых режимах, сотрудник Киевского политехнического института В. В. Лавриненко обнаружил вращение одного из них в держателе. Разобравшись в причине этого явления, он в 1964 году создаёт первый пьезоэлектрический мотор вращения, а вслед за ним и линейный мотор для привода реле . За первым мотором с прямым фрикционным контактом он создаёт группы нереверсивных моторов с механической связью пьезоэлемента с ротором через толкатели. На этой основе он предлагает десятки конструкций нереверсивных моторов, перекрывающих диапазон скоростей от 0 до 10 000 об/мин и диапазон моментов вращения от 0 до 100 Нм. Используя два нереверсивных мотора, Лавриненко оригинально решает проблему реверса. Интегрально на валу одного мотора он устанавливает второй мотор. Проблему ресурса мотора он решает, возбуждая крутильные колебания в пьезоэлементе.
На десятилетия опережая подобные работы в стране и за рубежом, Лавриненко разработал практически все основные принципы построения пьезоэлектрических моторов, не исключив при этом возможность работы их в режиме генераторов электрической энергии.
Учитывая перспективность разработки, Лавриненко совместно с соавторами, помогавшими ему реализовать его предложения, он защищает многочисленными авторскими свидетельствами и патентами. В Киевском Политехническом институте создаётся отраслевая лаборатория пьезоэлектрических моторов под руководством Лавриненко, организуется первое в мире серийное производство пьезомоторов для видеомагнитофона «Электроника-552». В последующем, серийно производятся моторы для диапроекторов «Днепр-2», кинокамер , приводов шаровых кранов и др. В 1980 году издательство «Энергия» печатает первую книгу по пьезоэлектрическим моторам , к ним появляется интерес. Начинаются активные разработки пьезомоторов в Каунасском политехническом институте под руководством проф. Рагульскиса К. М. . Вишневский В. С., в прошлом аспирант Лавриненко, выезжает в Германию, где продолжает работу по внедрению линейных пьезоэлектрических моторов на фирме PHyzical Instryment . Постепенное изучение и разработка пьезоэлектрических моторов выходит за пределы СССР . В Японии и Китае активно разрабатываются и внедряются волновые двигатели, в Америке — сверхминиатюрные двигатели вращения.

Ультразвуковой двигатель имеет значительно меньшие габариты и массу по сравнению с аналогичным по силовым характеристикам электромагнитным двигателем . Отсутствие обмоток, пропитанных склеивающими составами, делает его пригодным для использования в условиях вакуума. Ультразвуковой двигатель обладает значительным моментом самоторможения (до 50 % от величины максимального крутящего момента) при отсутствии питающего напряжения за счёт своих конструктивных особенностей. Это позволяет обеспечивать очень малые дискретные угловые перемещения (от единиц угловых секунд) без применения каких-либо специальных мер. Это свойство связано с характером работы пьезодвигателя. Действительно, пьезоэлемент , который преобразует электрические колебания в механические питается не постоянным, а переменным напряжением резонансной частоты . При подаче одного или двух импульсов можно получить очень маленькое угловое перемещение ротора . Например, некоторые образцы ультразвуковых двигателей, имеющие резонансную частоту 2 МГц и рабочую частоту вращения 0,2-6 об/сек, при подаче одиночного импульса на обкладки пьезоэлемента дадут в идеальном случае угловое перемещение ротора в 1/9.900.000-1/330.000 от величины окружности, то есть 0,13-3,9 угловых секунд.
Одним из серьёзных недостатков такого двигателя является значительная чувствительность к попаданию в него твёрдых веществ (например песка). С другой стороны, пьезодвигатели могут работать в жидкой среде, например в воде или в масле.

На «гибкий» статор (тонкая биморфная пластина, чем тоньше пластина, тем больше амплитуда колебаний и тем ниже частота резонанса) «подаётся» переменное напряжение высокой частоты, которое вынуждает его производить ультразвуковые колебания, формирующие механическую бегущую волну , которая и толкает (зацепляет) расположенный рядом ротор. При движении влево толкатель — расклинивает, при движении вправо — заклинивает. На этом принципе работают все пьезоэлектрические моторы с толкателями. Увеличивая число толкателей можно создавать моторы с огромными пусковыми моментами.
Но если обычный электродвигатель можно сделать практически «на коленке», ультразвуковой двигатель с высоким КПД 80-90% без сложного оборудования создать нельзя. Всё же сделать ультразвуковой двигатель в домашних условиях возможно, но КПД не будет превышать 60%, для этого в качестве ротора можно взять шарикоподшипник и прижать к нему пьезопластину с согласованными размерами.


В основе работы пьезоэлектрических двигателей вращения лежит принцип, согласно которому все точки пьезоэлемента, входящие в контакт с ротором, должны двигаться по траекториям близким к эллиптическим. Для этого в пьезоэлементе одновременно возбуждают два типа взаимно ортогональных колебаний. Это может быть любое сочетание взаимно поперечных продольных, изгибных, сдвиговых и крутильных колебаний. Важным лишь является то, что эти колебания не должны быть механически связанными, то есть энергия с одного колебания не должна переходить в другое колебание (в квадратной пластине возбуждение продольных колебаний по её одной стороне приведёт к возбуждению продольных колебаний по другой стороне, что является примером связанности колебаний). Если колебания механически несвязанны, то между ними можно получить любой сдвиг фазы. А оптимальным для пьезоэлектрических моторов является сдвиг фазы равный 90 градусов. В простейшем моторе (рис.3) в пьезоэлементе электрически возбуждены продольные по длине волны, а поперечные волны — изгибные возбуждаются при движении конца пьезоэлемента по поверхности ротора. Размеры пьезоэлемента подбираются так, чтобы был механический резонанс и продольных и поперечных колебаний. Тогда коэффициент полезного действия может превышать 80 %. Для таких моторов фрикционный контакт между ротором и статором происходит по линии, что снижает их ресурс. Возбуждая одними электродами (1), рис. 4 в пьезоэлементе (2) крутильные колебания, а другими электродами (3) — продольные колебания можно создать мотор с плоским фрикционным контактом. Проблему ресурса Лавриненко решает таким способом. Он использует свойство наклонённой и прижатой к гладкой поверхности пластины изменять усилие прижима при движении в одну и противоположную сторону.
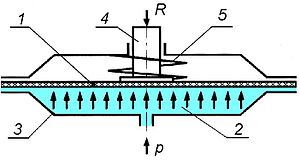
Одним из самых важных преимуществ данных типов двигателей является то, что для любой скорости вращения возможен прямой привод. В конструктивном отношении значительно упрощается привод и в ряде случаев существенно возрастает КПД, который «съедает» редуктор. Именно это свойство позволило разрабатывать приводы шаровых кранов с любым проходным сечением (рис. 5) и осуществить их серийное производство.

По быстродействию пьезоэлектрическим моторам нет равных. Это связано с тем, что их мощность не зависит от массы ротора, как это имеет место для электромагнитных моторов. За доли миллисекунды они набирают нужную скорость и могут конкурировать даже с дорогостоящими пьезоэлектрическими актюаторами, например, для топливных инжекторов.
Минимальный шаг пьезомоторов может составлять тысячные доли угловой секунды. На их основе создаются направляющие микроскопов, работающие в нанометровом диапазоне. Для бытовых низкооборотных приборов, из-за отсутствия редуктора, они бесшумны и не выделяют запаха от подгоревших обмоток, которых у них нет. Заторможенность ротора в отключённом состоянии, пластичность формы, способность интегрально вписываться в изделие также бывают полезными.
Пьезоэлектрические моторы могут полностью изготовляться из немагнитных материалов. Некоторые из них могут работать в условиях высоких температур (вплоть до 300 градусов Цельсия), в вакууме, в сильных магнитных полях, в условиях повышенной радиации, при погружении в воду или в масло.

Ультразвуковой двигатель может с успехом использоваться в тех областях техники, где необходимо достижение минимальных угловых и линейных перемещений. Например, в астрономии , в космических исследованиях, где требуется точная ориентировка по весьма малым объектам (звёздам); в ускорителях заряженных частиц , где необходимо удерживать пучок в строго заданных геометрических координатах; в научных исследованиях при изучении (ориентировка головки гониометра ); в робототехнике и т. д.
На основе пьезоэлектрических моторов разрабатывались: приводы антенн и камер наблюдения, электробритвы, приводы режущего инструмента, лентопротяжные механизмы, башенные уличные часы, приводы шаровых кранов, низкооборотные (2 об/мин) приводы рекламных платформ, электродрели, приводы детских игрушек и подвижных протезов, потолочные вентиляторы, приводы роботов и т. д.
Волновые пьезоэлектрические моторы также используются в объективах для однообъективных зеркальных фотоаппаратов . Вариации названия технологии в таких объективах различных производителей:
В станкостроении такие двигатели применяются для сверхточного позиционировании режущего инструмента.
К примеру, есть специальные резцедержатели для токарных станков с микроприводом резца.
|
||||||||||||||||||
|
||||||||||||||||||
|
||||||||||||||||||
|
||||||||||||||||||
|
||||||||||||||||||
|
||||||||||||||||||
|
||||||||||||||||||