Пространства имён
- 1 year ago
- 0
- 0

Двоичное разбиение пространства ( англ. binary space partitioning ) — метод рекурсивного разбиения евклидова пространства в выпуклые множества и гиперплоскости . В результате объекты получают представление в виде структуры данных, называемой BSP-деревом .
BSP-дерево используется для эффективного выполнения следующих операций в трёхмерной компьютерной графике :
BSP-деревья были впервые применены специалистами компании LucasArts в начале 80-х годов. Популярность у разработчиков они завоевали благодаря компании id Software , разработавшей движки Doom ( 1993 ) и Quake ( 1996 ).
В BSP-дереве каждый узел связан с разбивающей прямой или плоскостью в 2-мерном или 3-мерном пространстве соответственно. При этом все объекты, лежащие с фронтальной стороны плоскости, относятся к фронтальному поддереву, а все объекты, лежащие с оборотной стороны плоскости, относятся к оборотному поддереву. Для определения принадлежности объекта к фронтальной или оборотной стороне разбивающей прямой или плоскости необходимо исследовать положение каждой его точки. Положение точки относительно плоскости определяется скалярным произведением нормали плоскости и координат точки в однородных координатах . Возможно три случая:
Если для всех точек объекта скалярное произведение больше или равно 0, то он относится к фронтальному поддереву. Если для всех точек объекта скалярное произведение меньше или равно 0, то он относится к оборотному поддереву. Если для всех точек объекта скалярное произведение равно 0, то не играет роли, к какому поддереву он принадлежит. Если скалярные произведения для точек объекта имеют разный знак, то он рассекается разбивающей плоскостью так, чтобы полученные объекты лежали только с фронтальной или только с оборотной стороны. Для каждого подузла BSP-дерева справедливо вышеприведенное утверждение, с тем исключением, что рассмотрению подлежат только те объекты, которые принадлежат к фронтальной или оборотной стороне разбивающей плоскости родительского узла.

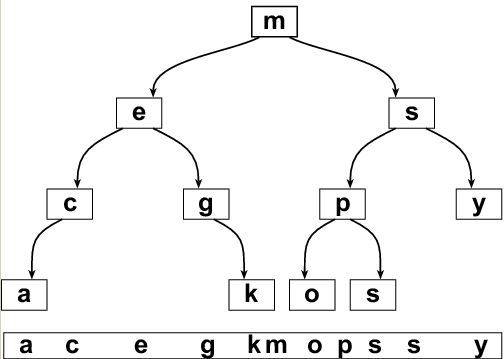
Вышеприведенное определение описывает только свойства BSP-дерева , но не говорит как его построить. Как правило, BSP-дерево строится для набора отрезков на плоскости или полигонов в пространстве, представляющих некоторую фигуру или сцену. Рассмотрим алгоритм построения BSP-дерева для набора полигонов в пространстве:
Разбивающая плоскость выбирается таким образом, чтобы сбалансировать дерево, то есть чтобы число полигонов во фронтальном и оборотном поддереве было приблизительно одинаково:
min(|N(Fi) — N(Bi)|)
где N(Fi) — число полигонов с фронтальной стороны некоторой разбивающей плоскости i, N(Bi) — число полигонов с оборотной стороны разбивающей плоскости i.
При сортировке объектов в порядке удаления от наблюдателя с помощью BSP-дерева исследуются взаимное расположение вектора и точки наблюдения ( POV ) и нормалей разбивающих плоскостей. Если нормаль разбивающей плоскости и вектор наблюдения сонаправлены , то фронтальное поддерево находится от наблюдателя дальше, чем оборотное, в противном случае оборотное поддерево находится от наблюдателя дальше, чем фронтальное. При этом, если разбивающая плоскость находится сзади наблюдателя, то сама плоскость, а также фронтальное или оборотное поддерево может быть не видны полностью. Рекурсивный алгоритм сортировки полигонов с помощью BSP-дерева следующий:
Процедура ОбойтиУзел(Узел)
Если Узел <> ПустойУказатель
Если ВекторыСонаправлены(ВекторНаблюдения, Узел.НормальРазбивающейПлоскости)
Если СкалярноеПроизведение(ТочкаНаблюдения, Узел.НормальРазбивающейПлоскости) >= 0
// Плоскость находится сзади наблюдателя, наблюдатель видит только фронтальное поддерево
ОбойтиУзел(Узел.ФронтальноеПоддерево);
Иначе
// Плоскость находится спереди наблюдателя,
// фронтальное поддерево находится дальше оборотного
ОбойтиУзел(Узел.ФронтальноеПоддерево);
ДобавитьПолигонВСписокОтображения(Узел.Полигон);
ОбойтиУзел(Узел.ОборотноеПоддерево);
КонецЕсли;
Иначе
Если СкалярноеПроизведение(ТочкаНаблюдения, Узел.НормальРазбивающейПлоскости) >= 0
// Плоскость находится спереди наблюдателя,
// оборотное поддерево находится дальше фронтального
ОбойтиУзел(Узел.ОборотноеПоддерево);
ДобавитьПолигонВСписокОтображения(Узел.Полигон);
ОбойтиУзел(Узел.ФронтальноеПоддерево);
Иначе
// Плоскость находится сзади наблюдателя, наблюдатель видит только оборотное поддерево
ОбойтиУзел(Узел.ОборотноеПоддерево);
КонецЕсли;
КонецЕсли;
КонецЕсли;
Конец;
Этот алгоритм можно оптимизировать, если учесть, что для некоторого набора полигонов дерево имеет вырожденную структуру, в том случае, когда для каждого полигона из этого набора все оставшиеся лежат только с фронтальной или только с оборотной стороны. Именно так сделал Джон Кармак в движке DOOM [ источник не указан 1752 дня ] .
Алгоритм для ускорения из рекурсивного может быть преобразован в итеративный.
Отсечение невидимых поверхностей реализуется путём введения дополнительной информации в BSP-дерево , такой как рамки (bounding boxes, bounding spheres). Рамки — это прямоугольники или параллелепипеды, окружности или сферы, которые ограничивают область расположения полигонов некоторого поддерева. Таким образом, каждый узел имеет две рамки. Поддерево гарантированно невидимо, если зрительная пирамида не пересекается с ограничивающим объектом. Обратное неверно. Однако прямого утверждения достаточно, чтобы отсечь обработку существенного количества объектов.
Выбор геометрических объектов, которыми представлены рамки, исходит из простоты алгоритма проверки пересечения зрительной пирамиды с рамкой.
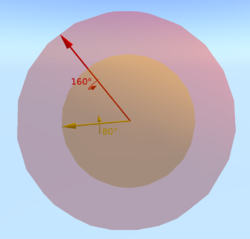
При поиске столкновений BSP-дерево используется для поиска плоскости, расположенной ближе всего к объекту. Чаще всего границы объекта задаются ограничиващей сферой (или окружностью) для упрощения вычислений. Выполняется обход BSP-дерева от корня до плоскости, расположенной ближе всего к объекту. При этом, если не обнаруживается пересечений ограничивающей сферы ни с одной плоскостью, то столкновения нет, в противном случае — есть.
Пример:
Процедура ПоискСтолкновения(Узел, Объект)
Если Узел <> ПустойУказатель
Если Расстояние(Узел.Плоскость, Объект.ЦентрОграничивающейСферы) > Объект.РадиусОграничивающейСферы
Если СкалярноеПроизведение(Объект.ЦентрОграничивающейСферы, Узел.НормальРазбивающейПлоскости) >= 0
// Объект находится с фронтальной стороны разбивающей плоскости,
// обходим только фронтальное поддерево
ПоискСтолкновения(Узел.ФронтальноеПоддерево, Объект);
Иначе
// Объект находится с обратной стороны разбивающей плоскости,
// обходим только оборотное поддерево
ПоискСтолкновения(Узел.ОборотноеПоддерево, Объект);
КонецЕсли;
Иначе
Вернуть ЕстьСтолкновение;
КонецЕсли;
Иначе
Вернуть НетСтолкновения;
КонецЕсли;
Конец;
Алгорим для ускорения из рекурсивного может быть преобразован в итеративный.
| Двоичные деревья | |
|---|---|
| B-деревья | |
| Префиксные деревья | |
| Недвоичные деревья | |
| Разбиение пространства | |
| Другие деревья | |
| Алгоритмы | |