Можно рассматривать несколько вариантов двойных маятников: два звена могут быть одинаковыми или иметь разную длину и вес; они могут быть
простыми маятниками
или
физическими маятниками
; движение может происходить в трёх измерениях или быть ограничено вертикальной плоскостью.
В следующем анализе звенья избраны как одинаковые физические маятники длины
и массы
, и их движение ограничено двумя измерениями.
У физического маятника масса распределена вдоль всей его длины. Если масса распределена равномерно, тогда центр масс каждого звена совпадает с его геометрическим центром, и звено имеет такой
момент инерции
относительно этой точки.
Первое слагаемое это
линейная
кинетическая энергия
центра масс
тел, второе слагаемое это
вращательная
кинетическая энергия центров масс каждого из стержней. Последнее слагаемое это потенциальная энергия тел в однородном гравитационном поле.
Подставив координаты и перегруппируя уравнения имеем
Движение двойного физического маятника (из численного интегрирования уравнения движения)
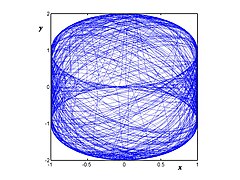
Траектории двойного маятника
При большой выдержке, двойной маятник проявляет хаотическое движение (отслежен с помощью
светодиодов
)
Последние четыре уравнения являются явными формулами для временной эволюций системы с заданным текущим состоянием. Невозможно продвинуться дальше и интегрировать эти уравнения аналитически, чтобы получить формулы для θ
1
и θ
2
как функции от времени. Однако возможно выполнить численное интегрирование, используя
метод Рунге — Кутты
или подобную технику.
Примечания
Levien RB and Tan SM. Double Pendulum : An experiment in chaos.
American Journal of Physics
1993; 61 (11) : 1038






![{\displaystyle L={\frac {1}{6}}m\ell ^{2}\left[{{\dot {\theta }}_{2}}^{2}+4{{\dot {\theta }}_{1}}^{2}+3{{\dot {\theta }}_{1}}{{\dot {\theta }}_{2}}\cos(\theta _{1}-\theta _{2})\right]+{\frac {1}{2}}mg\ell \left(3\cos \theta _{1}+\cos \theta _{2}\right).}](/images/007/874/7874709/9.jpg?rand=490574)
![{\displaystyle {\begin{cases}p_{\theta _{1}}\equiv {\frac {\partial L}{\partial {{\dot {\theta }}_{1}}}}={\frac {1}{6}}m\ell ^{2}\left[8{{\dot {\theta }}_{1}}+3{{\dot {\theta }}_{2}}\cos(\theta _{1}-\theta _{2})\right]\\\\p_{\theta _{2}}\equiv {\frac {\partial L}{\partial {{\dot {\theta }}_{2}}}}={\frac {1}{6}}m\ell ^{2}\left[2{{\dot {\theta }}_{2}}+3{{\dot {\theta }}_{1}}\cos(\theta _{1}-\theta _{2})\right].\end{cases}}}](/images/007/874/7874709/13.jpg?rand=293661)

![{\displaystyle {\begin{cases}{{\dot {p}}_{\theta _{1}}}={\frac {\partial L}{\partial \theta _{1}}}=-{\frac {1}{2}}m\ell ^{2}\left[{{\dot {\theta }}_{1}}{{\dot {\theta }}_{2}}\sin(\theta _{1}-\theta _{2})+3{\frac {g}{\ell }}\sin \theta _{1}\right]\\\\{{\dot {p}}_{\theta _{2}}}={\frac {\partial L}{\partial \theta _{2}}}=-{\frac {1}{2}}m\ell ^{2}\left[-{{\dot {\theta }}_{1}}{{\dot {\theta }}_{2}}\sin(\theta _{1}-\theta _{2})+{\frac {g}{\ell }}\sin \theta _{2}\right].\end{cases}}}](/images/007/874/7874709/15.jpg?rand=31421)