Лазерный диод
- 1 year ago
- 0
- 0




Ла́зерный гироско́п — оптический прибор для измерения угловой скорости , обычно применяется в системах инерциальной навигации . Лазерные гироскопы используют эффект Саньяка — появление фазового сдвига встречных световых волн во вращающемся кольцевом интерферометре . В отличие от механического гироскопа , данный прибор не стремится сохранить начальное направление, а измеряет угол поворота прибора в плоскости контура резонатора. Подсчитывая количество (или фазу для малых углов) и направление следования прошедших через площадки фотоприёмника пучностей стоячей волны, неподвижной в инерциальной системе отсчёта, можно получить значение угла, на который совершён поворот, а продифференцировав по времени — получить угловую скорость. Преимущества данного гироскопа — цифровой выходной сигнал, малое время готовности, отсутствие подвижных частей (в некоторых случаях).
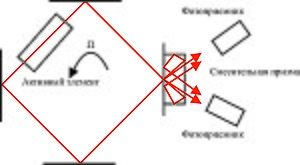
Прибор сам по себе является лазером и состоит из активной среды и резонатора, при работе происходит генерация излучения в двух направлениях . Работа лазерного гироскопа основана на эффекте Саньяка , два луча генерируются в резонаторе лазерного гироскопа и, если прибор вращается, то происходит генерация волн разной частоты для разных направлений из-за различных эффективных длин резонатора для разных направлений обхода (вследствие вращения). Описать разность частот в гироскопе, вызванную вращением, можно с помощью формулы:
где — площадь, охватываемая лучом, — периметр резонатора, — угловая скорость вращения гироскопа, — длина волны .
Резонатор лазерного гироскопа может быть достаточно сложным, но обычно это — кольцевой резонатор с тремя или четырьмя зеркалами, резонатор может быть выполнен как моноблочная конструкция, так и состоять из отдельных элементов. Часто резонатор выполняется в форме треугольника или квадрата. Размер гироскопа может быть от нескольких сантиметров до нескольких метров.
В лазерном гироскопе создаётся и поддерживается стоячая волна , а её узлы и пучности в идеальном случае связаны с инерциальной системой отсчёта . Таким образом, положение узлов и пучностей волны не меняется относительно инерциальной системы отсчёта, а при повороте резонатора (корпуса гироскопа) относительно стоячей волны на фотоприёмниках получаются движущиеся по ним интерференционные полосы. По ним измеряют угол поворота, считая количество пробегающих интерференционных полос.
Разрешение лазерного гироскопа (ЛГ) тем меньше, чем больше площадь резонатора, ограниченная лучами лазера.

При работе из лазера выходит два луча, распространяющихся в противоположных направлениях по замкнутому контуру. Лучи сводятся вместе, в результате получается бегущая интерференционная картина (ИК), пространственный период которой обычно около 1 мм . Направление движения, или знак приращения фазы ИК, определяется фотоприёмником с двумя площадками, расстояние между которыми равно 1/4 периода ИК. Приращение фазы на пропорционально углу поворота ЛГ и обычно составляет от 0,1—0,2′′ для больших ЛГ с периметром около 4 м до 10—20′′ для малых периметров (около 4 см ). Подсчитывая количество полос ИК или их долей (от 1/2 до 1/8), проходящих по фотоприёмнику за время накопления (от 1 мс до 1000 с ), можно определить угол поворота ЛГ вокруг оси, перпендикулярной к плоскости хода лучей за время накопления, а, следовательно, и среднюю угловую скорость за это время.
При работе гироскопа возникают ошибки при определении угла поворота. Ошибки обусловлены
Первые два типа погрешностей можно объяснить прежде всего влиянием активной среды — изменениями прямого и обратного рассеяния и коэффициента преломления, вызванные, например, влиянием температуры или эффектом Физо — Френеля .
Зона захвата возникает вблизи нуля выходной характеристики и не даёт возможности регистрировать сигнал при небольших угловых скоростях. Этот эффект вызван влиянием обратного рассеяния. При малых угловых скоростях различие частот излучения во встречных направлениях небольшое и происходит их синхронизация, делающая невозможным регистрацию сигнала. Для преодоления этого эффекта необходимо сделать различие частот встречных волн достаточно большим. Для этих целей можно использовать невзаимный элемент, магнитооптическую или механическую (виброподвес) частотные подставки.
Внешнее магнитное поле влияет через круговую составляющую в поляризации встречных лучей и магнитооптическую чувствительность отражающих элементов.
Температура влияет через изменение коэффициентов преломления отражающих элементов, изменение рассеяния при температурной перестройке резонатора, а также через изменение внутренних механических напряжений конструкции лазерного гироскопа.
Ускорения и вибрации вызывают изменение внутренних механических напряжений конструкции лазерного гироскопа, что приводит к изменениям оптических характеристик и сбоям в электронных блоках.
Главной особенностью лазерного гироскопа является наличие зоны захвата, приводящей к нечувствительности к вращению при малых угловых скоростях. Поэтому необходимо вывести рабочую точку на линейный участок выходной характеристики. Для этих целей используется частотная подставка: механическая, на эффектах Зеемана или Фарадея .
Основное применение лазерного гироскопа — навигация подвижных объектов, таких как самолёты или ракеты. Для маленьких приборов (например, сотовый телефон) используются меньшие и менее точные гироскопы.
Помимо навигации гироскоп можно применять для фундаментальных исследований или измерения колебаний земной коры (землетрясения) Для этих целей используются большие гироскопы, с периметром в несколько метров.
Самый точный в мире лазерный гироскоп с периметром 16 м построен в геодезической обсерватории Веттцелль Мюнхенского технического университета . Он предназначен для фиксации тончайшего изменения проекции угловой скорости вращения Земли на входную ось лазерного гироскопа.
Самый маленький лазерный гироскоп КМ-2 с периметром 2 см предназначен для измерения угловой скорости быстровращающегося ротора.
|
|
|
|---|