Джемини (космическая программа)
- 1 year ago
- 0
- 0


«Луноход» («проект Е-8») — серия советских дистанционно управляемых самоходных аппаратов- планетоходов для исследования Луны . В честь двух запущенных в рамках неё аппаратов была названа равнина на Плутоне ( лат. Lunokhod Planitia ), название утверждено МАС 3 февраля 2021 года .
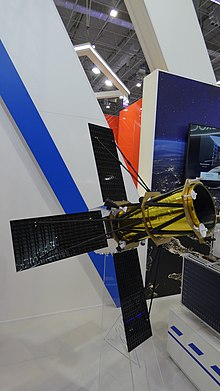
В рамках реализации советской лунно-посадочной пилотируемой программы Н-1 - Л3 в экспедициях предусматривалось использование модификации луноходов, дооборудованных радиомаяком (для предварительного выбора места посадки) и ручным управлением (как транспорт для перемещения космонавта ).
«Луноходы» создавались под руководством Г. Н. Бабакина в конструкторском бюро Машиностроительного завода имени С. А. Лавочкина ( Химки , Московская область ). Самоходное шасси для лунохода было создано под руководством А. Л. Кемурджиана во ВНИИтрансмаш ( Ленинград ), где до этого разрабатывались ходовые части танков . Этой же организации была поручена разработка самоходного шасси с блоком управления движением и системой безопасности с комплектом информационных датчиков.
Эскизный проект лунохода был утверждён осенью 1966 года . К концу 1967 года была готова вся конструкторская документация . Масса и габариты создаваемых луноходов были обусловлены максимальной возможной массой, доставляемой на поверхность Луны унифицированной посадочной ступенью, и габаритами головного обтекателя ракеты-носителя «Протон», с помощью которой связка «посадочная ступень — луноход» выводилась на траекторию полёта к Луне.
Модифицированные для пилотируемых экспедиций луноходы должны были заранее детально обследовать предполагаемый район посадки лунного корабля, а также исполнять роль радиомаяков для осуществления посадки пилотируемого корабля в выбранное место. Предполагалось, что перед осуществлением высадки космонавта на Луну будут отправлены два лунохода для выбора основного и запасного районов прилунения. В запасной район впоследствии должна была сесть в автоматическом режиме резервная беспилотная лунная кабина. В основном районе прилунилась бы лунная кабина с космонавтом. Основной режим посадки лунной кабины предполагался автоматическим — на радиомаяк лунохода. Если же при посадке основной лунный корабль получал повреждения, которые не позволили бы ему стартовать с Луны, то космонавт должен был воспользоваться одним из луноходов для поездки к резервной лунной кабине. Космонавт также мог использовать луноход как транспорт для себя и перемещаемого оборудования. На таком модифицированном луноходе предполагалось иметь запас кислорода, разъёмы для шлангов лунного скафандра, место космонавта в виде небольшой площадки с пультом управления в передней части аппарата.
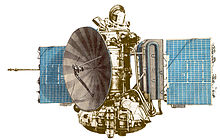
«Луноход» представляет собой установленный на самоходное шасси герметичный .
Масса машины (по исходному проекту) — 900 кг, диаметр по верхнему основанию корпуса — 2150 мм, высота — 1920 мм, длина шаси — 2215 мм, Колея — 1600 мм. Колёсная база — 1700 мм. Диаметр колёс по — 510 мм при ширине в 200 мм. Диаметр приборного контейнера — 1800 мм. Максимальная скорость передвижения по Луне — 4 км/ч.
Гермокорпус «Лунохода» является основной частью конструкции и служит платформой для аппаратуры бортовых систем и её защиты от воздействия внешней среды. Гермокорпус выполняет также функции платформы для шасси и служит для крепления на нём элементов ходовой части. Корпус имеет форму перевёрнутого усечённого конуса с выпуклыми верхним и нижним днищем. С целью уменьшения массы корпус изготовлен из магниевых сплавов. Верхняя поверхность корпуса используется как радиатор-охладитель системы терморегуляции, закрываемый на ночь крышкой с солнечной батареей для сохранения тепла. Корпус «Лунохода» для сохранения тепла покрыт снаружи теплоизолирующим покрытием толщиной около 20 см. Для обогрева аппаратуры применялся радиоизотопный источник тепла , содержащий ампулы с 210 Po . Источник был вынесен за пределы корпуса. Использовалась активная двухконтурная система терморегулирования .
Шасси «Лунохода» было предназначено для перемещения аппарата по поверхности Луны (для смазки узлов вращения в вакууме использовался сульфид молибдена(IV) ). В состав шасси входят следующие агрегаты и подсистемы:
Система электропитания «Лунохода», выполненная по схеме « солнечная батарея — буферная аккумуляторная батарея », обеспечивает питание всех бортовых систем постоянным током . На «Луноходе» применены серебряно-кадмиевые аккумуляторные батареи ёмкостью 200 ампер-часов . Площадь солнечной батареи составляла 3,5 м² (электрическая мощность — 180 ватт ).
Предельное энергопотребление составляло в течение 10 мин — 1 кВт. Номинальное энергопотребление — 250 Вт.
Система управления луноходом состояла из двух телевизионных камер, подключённых к центральному блоку, содержащему узлы электроники и автоматики. Блок состоял из двух полукомплектов (по одному для каждой камеры), из которых один работал, а второй находился в резерве. Телевизионные камеры «Лунохода-1» были выполнены на видиконах с регулируемой памятью диаметром 13,5 мм. Вес телевизионной системы составлял 12 кг, потребляемая ею мощность равнялась 25 Вт. В передающей камере «Лунохода-2» были использованы видиконы диаметром 26 мм, что положительно повлияло на качество изображения, при том, что габариты и потребляемая мощность камер увеличились незначительно. Конструкция видиконов обладала высокой механической прочностью и устойчивостью как на активном участке траектории полёта, так и в движении.
Антенны :

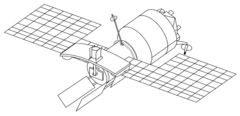
На 125-й секунде полёта двигатель первой ступени прекращал работу; производилось её отделение, запускался двигатель второй ступени. На 200-й секунде полёта, на высоте 80 км, сбрасывался головной обтекатель. На 375-й секунде полёта выключались двигатели второй ступени; при этом аппарат имел скорость 4,5 км/с. Производилось разделение ступеней, включался двигатель третьей ступени. На 588-й секунде полёта происходило отключение двигателя третьей ступени и отделение головного блока; дальнейший разгон производился двигателями блока «Д». На 958-й секунде полёта двигатель блока «Д» отключался; аппарат оказывался на промежуточной орбите вокруг Земли. На 35-й минуте полёта раскрывались опоры посадочного устройства. На 66-й минуте полёта блок «Д» ориентировался в пространстве необходимым образом и вновь запускал двигатель для перелёта к Луне. Через 12 секунд после отключения двигателя блока «Д» происходило его отделение и раскрытие антенн.
Через 4 суток 7 часов после старта Е-8 с помощью двигательной установки ступень КТ выводился на окололунную орбиту с высотой 120 км и периодом обращения 2 часа. Через сутки проводилась первая коррекция для снижения высоты перицентра над выбранной точкой посадки до высоты 20 км, а ещё сутки спустя — вторая коррекция для исправления плоскости подхода аппарата к точке посадки.
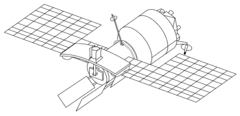
Через 7 суток 16 часов после старта запускалась тормозная двигательная установка, снижавшая скорость почти до нуля на высоте 2,3 км над поверхностью. До высоты 700 м происходил спуск с выключенным двигателем; далее до высоты 20 м спуск шёл с работающим двигателем, после чего основная двигательная установка ступени КТ отключалась и запускались двигатели малой тяги. На высоте 1-2 метра, определяемой гамма-высотомером «Квант-2», двигатель отключался, и станция совершала мягкую посадку на поверхность Луны.
После прилунения изображение места посадки передавалось на Землю, и по команде операторов раскрывались две пары трапов. Луноход отделялся от ступени КТ и сходил на лунную поверхность; открывалась его солнечная батарея и начиналась зарядка аккумуляторов.



«Луноход» мог двигаться с двумя различными скоростями, в двух режимах: ручном и дозированном. Дозированный режим представлял собой автоматический этап движения, программируемый оператором.
Поворот осуществлялся путём изменения скорости и направления вращения колёс левого и правого бортов.
Управление «Луноходами» осуществлялось группой операторов из 11 человек, составлявших сменные « экипажи »: командир , водитель , оператор , , бортинженер . Центр управления находился в посёлке Школьное (НИП-10). Каждый сеанс управления длился ежедневно до 9 часов, с перерывами в середине лунного дня (на 3 часа) и на лунную ночь; экипажи менялись каждые два часа. .
Состав команды:
Отработка действий операторов проводилась на действующей модели «Лунохода» на , на котором имитировались лунные реголит и рельеф .
Дистанционное управление осуществлялось при помощи комплекса аппаратуры контроля и обработки телеметрической информации на базе ЭВМ « Минск-22 » — СТИ-90.
Основную сложность при управлении луноходом создавало запаздывание радиосигнала , — радиосигнал с Земли до Луны и обратно проходит около 2 секунд, а передача одного кадра занимала от 3 до 20 секунд, в зависимости от рельефа .
|
|
В статье есть список
источников
, но
не хватает
сносок
.
|
|
|
|
|---|
| Программы | |
|---|---|
| Пролётные | |
| Орбитальные | |
| Посадочные | |
| Луноходы | |
| Человек на Луне | |
| Будущие |
|
| Неудачные | |
| Отменённые | |
| См. также | |
|
Жирный шрифт
обозначает действующие космические аппараты
|
|