Память на магнитных сердечниках
- 1 year ago
- 0
- 0

|
|
Содержимое этой статьи
нуждается в чистке
.
|




Накопитель на гибких магнитных дисках ( НГМД ; англ. floppy disk drive ) — дисковод , предназначенный для считывания и записи информации с дискеты . Работает по тем же физическим принципам, что и магнитофон , и фактически является его специализированной разновидностью.
Приводы (позиционирования головок и вращения) и система считывания-записи управляется электронной схемой, размещённой на печатной плате, которая находится внутри корпуса дисковода. В отечественной терминологии система управления называлась КНГМД — контроллер накопителя на гибких магнитных дисках.
Накопители на гибких дисках, ровно как и сами носители — дискеты, были массово распространены с 1970-х и до конца 1990-х годов. В XXI веке НГМД уступают место более ёмким CD , DVD и удобным в использовании флеш-накопителям .
Для считывания с поверхности диска двигатель, который осуществляет перемещения головок по диску в двух направлениях с определённым приращением, или шагом, называется шаговым двигателем . Двигатель управляется контроллером диска, который устанавливает головки в соответствии с любым относительным превращением в пределах границ перемещения привода головок. В миниатюрных дисководах на 3½″ головки монтируются на червячной передаче, приводимой в движение непосредственно валом шагового двигателя.
Диски имеют два типа плотности — радиальную и линейную. Радиальная плотность указывает, сколько дорожек может быть записано на диске, и выражается в количестве дорожек на дюйм ( англ. Track Per Inch, TPI ). Линейная плотность — это способность отдельной дорожки накапливать данные и выражается в количестве битов на дюйм ( англ. Bits Per Inch, BPI ). Шаговые двигатели не могут осуществлять непрерывное позиционирование, обычно он поворачивается на точно определённый угол и останавливается. Большинство шаговых двигателей, установленных в дисководах гибких дисков, осуществляют перемещение с определённым шагом, связанным с расстоянием между дорожками на диске. За исключением дисковода гибких дисков диаметром 5¼″ ёмкостью 360 Кбайт, которые выпускались только с плотностью 48 TPI и в которых использовался шаговый двигатель с приращением 3,6°, во всех остальных типах дисководов (96 или 135 TPI) обычно используется шаговый двигатель с приращением 1,8°. Кроме того, шаговый двигатель выполняет перемещение между фиксированными ограничителями и должен останавливаться при определённом положении ограничителя.
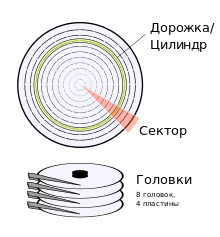
Позиционирование головок — это операция расположения головок относительно дорожек на диске (узкие концентрические кольца на диске), позволяет приступить к чтению или записи информации на диск. Цилиндр ( англ. cylinder ) — количество дорожек, с которых можно считать информацию, не перемещая головок. Кольцевые дорожки, расположенные друг под другом на разных сторонах диска, образуют воображаемый цилиндр, отсюда и название. Термин обычно используется как синоним дорожки, а поскольку гибкий диск в дискете имеет две стороны, а дисковод для гибких дисков — только две головки, в гибком диске на один цилиндр приходится две дорожки.


|
|
Этот раздел
не завершён
.
|



Для подключения дисковода имеются два разъема: один для электрического питания, а другой для передачи данных и сигналов управления. Эти разъемы в компьютерной промышленности стандартизованы: для подключения питания используется четырёхконтактный линейный разъем Mate-N-Lock фирмы AMP большого и малого размеров, сигнальный — 34-контактные разъемы. В дисководах формата 5¼″ обычно используется большой разъем для питания, в то время как в большинстве дисководов формата 3½″ для питания используется разъем меньшего размера.
«Странность» сигнального кабеля заключается в том, что линии 10—16 разрезаны и переставлены (перекручены) между разъемами дисководов. Это перекручивание переставляет первое и второе положения перемычки выбора дисковода и сигналы включения двигателя, а следовательно, меняет на противоположные установки сигнала DS для дисковода, находящегося за перекручиванием. Соответственно все дисководы в компьютере с этим типом кабеля имеют перемычки, установленные одинаково, а настройка и установка дисководов (вместо первый и второй, они обозначаются в системе как A и B) упрощается. Как правило, материнская плата содержит интегрированный контроллер дисководов (ровно как и отдельная плата контроллера, существовавшая ранее), обеспечивающий установку пары дисководов.
При подключении кабелей необходимо учитывать их ориентацию, в случае если неправильно подключён сигнальный кабель, лампочка на лицевой панели дисковода будет светиться сразу после подачи питания. В случае же неправильной ориентации кабеля питания на электронную схему управления дисководом вместо 5 В подаётся питание 12 В, что гарантированно приводит к выходу её из строя. Учитывая, что стоимость ремонта штучной платы превышает оптовую стоимость самого дисковода, ремонт дисковода, как правило, экономически не целесообразен.




Контроллер гибких дисков, со стороны современного программирования, выглядит достаточно примитивно — регистры, имеющие байтовую организацию, сведены в блок из восьми последовательно расположенных ячеек (реально используется лишь часть из них).
| Адрес | Обозначение | Чтение/Запись | Назначение |
|---|---|---|---|
| 3F0 16 | - | - | Не используется |
| 3F1 16 | - | - | Не используется |
| 3F2 16 | DOR | Чтение/Запись | Регистр цифрового вывода |
| 3F3 16 | TSR | Чтение/Запись | Регистр привода ленточного накопителя |
| 3F4 16 | MSR | Чтение | Основной регистр статуса |
| 3F4 16 | DSR | Запись | Регистр выбора скорости передачи данных |
| 3F5 16 | FIFO | Чтение/Запись | Регистр буфера данных |
| 3F6 16 | - | - | Не используется |
| 3F7 16 | DIR | Чтение | Регистр цифрового ввода |
| 3F7 16 | CCR | Запись | Регистр управления конфигурацией |
Предназначен для обслуживания ленточного накопителя , поэтому использует свободные разряды (с третьего по восьмой), но не имеет единого стандарта.
Доступен только для записи. В «1» соответствующий бит устанавливается в случае следующего состояния:
| Значение разрядов DRATE | Скорость передачи данных | ||
|---|---|---|---|
| Бит 1 | Бит 0 | Режим FM | Режим MFM |
| 0 | 0 | 250 кб/с | 500 кб/с |
| 0 | 1 | 150 кб/с | 300 кб/с |
| 1 | 0 | 125 кб/с | 250 кб/с |
| 1 | 1 | - | 1 Мб/с |
| Значение разрядов PRECOMP | Задержка предкомпенсации, нс | ||
|---|---|---|---|
| Бит 4 | Бит 3 | Бит 2 | |
| 0 | 0 | 0 | «По умолчанию» |
| 0 | 0 | 1 | 41,67 |
| 0 | 1 | 0 | 83,34 |
| 0 | 1 | 1 | 125,00 |
| 1 | 0 | 0 | 166,67 |
| 1 | 0 | 1 | 208,33 |
| 1 | 1 | 0 | 250,00 |
| 1 | 1 | 1 | 0 (нет предкомпресии) |
Участвует во всех дисковых операциях чтения и записи. Ёмкость — 16 байт.
Доступен только для считывания. Старший разряд ( англ. Disk CHange, DCH ) отображает сигнал смены диска, остальные — зарезервированные.
Доступен только для записи. Два младших разряда дублируют функции регистра DSR в аспекте задачи скорости передачи данных, остальные разряды зарезервированные.
Сведения о состоянии контроллера хранятся в не имеющих собственных адресов, и поэтому недоступных, регистрах.

Первые дисководы были предназначены для работы с дискетами диаметром 8″, которые вмещали 80, 256 или 800 КБ информации.

.jpg)
Следующим массовым форматом стали дискеты диаметром 5¼″; распространение с ними получили и соответствующие дисководы.
В качестве устройства для постоянного хранения данных первого массового персонального компьютера — IBM PC , выпущенного в 1981 году фирмой IBM , — предполагалось использовать один или два накопителя на 5¼-дюймовых гибких дисках.
Высота дисковода для 5¼-дюймовых дискет равна 1 U , а ширина почти равна трём его высотам. Это иногда использовали производители корпусов компьютеров , где три устройства, помещённые в квадратную «корзину», могли быть вместе с ней переориентированы с горизонтального на вертикальное расположение.
Дисководы формата 3½″ высокой плотности (неформатированная ёмкость дискеты, определяемая плотностью записи и площадью носителя, составляет 2 Мб ) впервые появились в компьютерах IBM PS/2 в 1987 году. Эти дисководы записывают с 18 секторами на дорожке, создавая в результате ёмкость 1,44 Мб , имеют скорость вращения 300 об/мин и записывают в 1,2 раза больше данных, чем дисководы формата 5¼″ на 1,2 Мб (скорость передачи данных в этих дисководах высокой плотности одинакова, и они совместимы с одними и теми же контроллерами высокой и низкой плотности). Для того, чтобы использовать максимальную для большинства стандартных контроллеров дисководов высокой и низкой плотности скорость передачи данных 500 000 бит/с , эти дисководы должны иметь скорость 300 об/мин . Если дисковод будет вращать дискету со скоростью 360 об/мин (как дисковод формата 5¼″), то число секторов на дорожку должно быть уменьшено до 15, иначе контроллер не будет успевать обрабатывать сигналы.
Промышленный выпуск дисководов сверхвысокой ёмкости на 2,88 Мбайт Toshiba начала в 1989 году. В 1991 году IBM официально приняла эти дисководы для установки в компьютерах PS/2, и практически все PS/2, выпущенные с тех пор, содержат эти дисководы как стандартное оборудование. Для работы с такими дисководами требуется установленная ОС MS-DOS версии 5.0 или старше.
Для правильной работы дисковода на 2,88 Мб необходимо обновление дискового контроллера, так как эти дисководы имеют ту же скорость вращения 300 об/мин , но записывают 36, а не 18 секторов на одной дорожке. В отличие от контроллеров дисководов предыдущих форматов, максимальная скорость передачи данных которых составляет 500 000 бит/с , для того что бы эти 36 секторов были считаны или записаны за то же время, которое требуется дисководу на 1,44 Мбайт для чтения и записи 18 секторов , от контроллера требуется гораздо более высокой скорости передачи данных, 1 000 000 бит/с .
|
|
Для улучшения этой статьи
желательно
:
|