![{\displaystyle \Pi _{f}=1-exp\left[-{\frac {\left({\frac {V_{initial}^{2}}{2}}-{\frac {V_{i}^{2}}{2}}\right)+\int {g}\,dr}{\eta _{0}h_{PR}\left(1-{\frac {D+D_{e}}{F}}\right)}}\right]}](/images/008/680/8680689/34.jpg?rand=115970)
![{\displaystyle \Pi _{f}=1-exp\left[-{\frac {g_{0}r_{0}\left(1-{\frac {1}{2}}{\frac {r_{0}}{r}}\right)}{\eta _{0}h_{PR}\left(1-{\frac {D+D_{e}}{F}}\right)}}\right]}](/images/008/680/8680689/35.jpg?rand=807733)
![{\displaystyle \Pi _{f}=1-exp\left[-{\frac {g_{0}R}{\eta _{0}h_{PR}\left(1-\phi _{e}\right){\frac {C_{L}}{C_{D}}}}}\right]}](/images/008/680/8680689/36.jpg?rand=560424)

![{\displaystyle \Pi _{f}=1-exp\left[{-BR}\right]}](/images/008/680/8680689/38.jpg?rand=161090)




Прямоточный воздушно-реактивный двигатель
- 1 year ago
- 0
- 0



Гиперзвуково́й дви́гатель (ГПВРД) ( англ. Scramjet ) — предназначенный для установки на достигающих гиперзвуковых скоростей соответствующих летательных аппаратах вариант прямоточного воздушно-реактивного двигателя (ПВРД), который отличается от обычного сверхзвуковым сгоранием. На бо́льших скоростях для сохранения эффективности двигателя необходимо избегать сильного торможения приходящего воздуха и производить сжигание топлива в сверхзвуковом воздушном потоке.
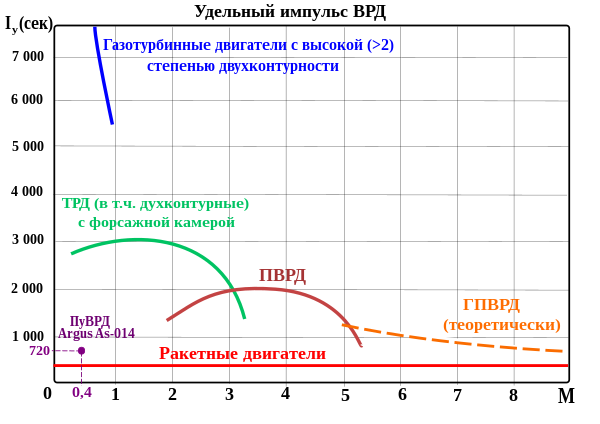
Верхний предел скорости гиперзвукового ПВРД (ГПВРД) без использования дополнительного окислителя оценивается в М 12—24. Исследования в рамках проекта Rockwell X-30 в 1980-х годах установили верхнее значение скорости для работы ГПВРД, соответствующим М17 в связи с обеспечением условий для сгорания в двигателе. Для сравнения, самый быстрый пилотируемый самолёт со сверхзвуковыми комбинированными турбопрямоточными воздушно-реактивными двигателями Lockheed SR-71 «Blackbird» компании Lockheed достигает скорости не выше М3,4. В отличие от ракетного двигателя , ГПВРД использует не окислитель, транспортируемый вместе с аппаратом, а атмосферный воздух, поэтому он теоретически обладает гораздо более высоким показателем эффективности двигателя — удельным импульсом по сравнению с большинством существующих ракетных двигателей.
Так же как и сверхзвуковой ПВРД, гиперзвуковой ПВРД состоит из имеющего сужение воздуховода — воздухозаборника , в котором поступающий в него со скоростью полёта летательного аппарата (ЛА) воздух тормозится и сжимается, камеры сгорания , где происходит сжигание топлива, сопла , через которое происходит истечение газообразных продуктов сгорания топлива со скоростью, бо́льшей скорости полета, что и создаёт тягу двигателя . Как и сверхзвуковой ПВРД, гиперзвуковой ПВРД имеет мало движущихся частей или не имеет их вовсе. В частности, в нём отсутствуют компрессор и турбина , которые присутствует в турбореактивном двигателе (ТРД) и являются самыми дорогостоящими частями такого двигателя, являясь при этом потенциальным источником проблем в процессе эксплуатации.
Для работы гиперзвуковой ПВРД нуждается в проходящем сквозь него сверхзвуковом воздушном потоке. Поэтому подобно сверхзвуковому ПВРД, гиперзвуковой ПВРД имеет минимальную скорость, при которой он может функционировать, примерно равную М7—8 . Таким образом, аппарат с гиперзвуковым ПВРД нуждается в другом способе разгона до скорости, достаточной для работы гиперзвукового ПВРД. Гибридный сверхзвуковой/гиперзвуковой ПВРД может иметь ме́ньшее значение минимальной рабочей скорости, и некоторые источники указывают, что экспериментальный гиперзвуковой самолёт Boeing X-43 имеет именно такой двигатель. Последние испытания X-43 производились с помощью ракетного ускорителя, запускаемого с самолёта-носителя и разгоняющего этот аппарат до скорости 7,8М.
Для гиперзвуковых аппаратов характерны проблемы, связанные с их весом и конструктивной и эксплуатационной сложностью. Перспективность гиперзвуковых ПВРД активно обсуждается в основном по той причине, что многие параметры, которые в конечном итоге определят эффективность самолёта с таким двигателем, остаются неопределёнными. Это, в частности, также связано со значительными затратами на испытания таких летательных аппаратов. Такие хорошо финансируемые проекты, как X-30, были приостановлены или закрыты до создания экспериментальных моделей.
Начиная со Второй мировой войны тратились значительные усилия на исследования в области достижения больших скоростей реактивными самолётами и ракетопланами . В 1947 году экспериментальный ракетный самолёт Bell X-1 совершил свой первый в истории сверхзвуковой полёт и уже к 1960 году начали появляться предложения и проекты по полётам с гиперзвуковыми скоростями. За исключением проектов таких ракетопланов, как North American X-15 , специально спроектированных для достижения больших скоростей, скорости реактивных самолётов оставались в пределах М1—3.
В 1950-х и 1960-х годах создавались различные экспериментальные гиперзвуковые ПВРД, которые испытывались на земле. Применительно к гражданскому авиатранспорту, основной целью создания и применения гиперзвуковых ПВРД считалось скорее снижение эксплуатационных расходов, чем сокращение длительности перелётов. Поскольку сверхзвуковые ТРД сложнее дозвуковых, а сверхзвуковые ЛА сложнее и имеют более низкое аэродинамическое качество , чем дозвуковые, то сверхзвуковые ЛА, оснащённые ТРД, расходуют значительно большее количество топлива , чем дозвуковые. Поэтому коммерческие авиакомпании предпочитали обслуживать авиалинии дозвуковыми широкофюзеляжными самолётами , а не (« Конкорд » и Ту-144 ). Рентабельность использования последних была едва заметна, а убыточность полётов Конкордов British Airways за время его эксплуатации в среднем составила 40 % (без учёта субсидирования полётов государством).
Одной из основных черт военных самолётов является достижение наибольшей манёвренности и скрытности, что противоречит аэродинамике гиперзвукового полёта. В период 1986—1993 годов в США была предпринята серьёзная попытка создания одноступенчатой космической системы Rockwell X-30 (фирма Rockwell International , проект NASP, англ. National Aero-Space Plane ) на базе гиперзвукового ПВРД, но она потерпела неудачу. Тем не менее, концепция гиперзвукового полёта не ушла со сцены и менее масштабные исследования продолжались на протяжении последних двух десятилетий. Например, 15 июня 2007 года DARPA и Министерство обороны Австралии сообщили об успешном гиперзвуковом полёте со скоростью 10М с использованием ракетного ускорителя для разгона до минимальной рабочей скорости на в центральной Австралии. В США Пентагон и НАСА сформировали Национальную гиперзвуковую стратегию ( англ. National Hypersonics Strategy ) с целью исследовать спектр возможностей гиперзвукового полёта. Великобритания , Австралия , Франция , Россия и Индия (проект RLV-TD ) также имеют свои программы исследований, однако на 2009 год не было создано ни одного «рабочего» аппарата с гиперзвуковым ПВРД, — все имеющиеся и испытываемые модели и образцы создаются в рамках экспериментов по их исследованию.
В СССР разработкой подобных систем занимался Центральный институт авиационного моторостроения (ЦИАМ) имени П. И. Баранова, расположенный в городе Москве и Лыткарино . В 1970-х годах стартовали работы по созданию гиперзвукового ПВРД и гиперзвуковой летающей лаборатории (ГЛЛ) «Холод» на базе ракеты С-200 , на которой в Казахстане было проведено уникальное лётное испытание гиперзвукового ПВРД на скорости 5,7M. На данный момент институт ведёт работы по перспективной ГЛЛ «Игла» («Исследовательский гиперзвуковой летательный аппарат») и «Холод-2» со сверхзвуковым ПВРД .
Проблема усложняется обнародованием, зачастую только частичным, ранее засекреченных материалов по экспериментам, которые сохраняются в тайне, но по которым, тем не менее, делаются утверждения о получении работоспособных моделей двигателя. Кроме этого, возникают сложности с подтверждением достоверности таких сведений и, в частности, факта сверхзвукового сгорания и получения требуемой тяги. Таким образом, по крайней мере четыре группы, в которые входят несколько государств и организаций, имеют законные основания утверждать, что являются «первыми».
ГПВРД является типом двигателя, предназначенным для работы на больших скоростях, которые более характерны для ракет , чем для самолётов. Основное отличие аппарата с таким двигателем от ракеты состоит в том, что он не несёт на себе окислитель для работы двигателя, используя в этих целях атмосферный воздух. Обычные самолёты с прямоточными ( ПВРД ), турбореактивными ( ТРД ), двухконтурными турбовентиляторными ( ДТВД ) и турбовинтовыми ( ТВД ) двигателями имеют то же свойство — используют атмосферный воздух, — но их применение ограничено дозвуковыми и сверхзвуковыми скоростями.
Турбореактивные двигатели эффективны на дозвуковых и умеренных сверхзвуковых скоростях, но их эффективность быстро снижается с ростом скорости полёта при числах М>2. Объясняется это тем, что при сверхзвуковой скорости полёта с ростом числа Маха быстро растёт температура торможения в набегающем на двигатель потоке воздуха. В двигателе рост температуры воздуха до значений, близких к температуре торможения происходит при его торможении и сжатии в воздухозаборнике. В ТРД воздух дополнительно сжимается и нагревается в компрессоре. В результате с ростом числа М полёта растёт температура воздуха, поступающего в камеру сгорания ТРД. После камеры сгорания, где происходит повышение температуры за счёт сгорания топлива, смесь воздуха и продуктов сгорания подаётся в турбину. Прочностные свойства турбины ограничивают максимально допустимую температуру газа на входе в неё, а вместе с этим и максимальное количество топлива, которое безопасно можно подать и сжечь в камере сгорания ТРД. С ростом скорости полёта в ТРД приходится уменьшать величину подогрева газа в камере сгорания. Дополнительной проблемой ТРД является уменьшение пропускной способности компрессора с ростом температуры воздуха на его входе. При некоторой скорости полёта эти факторы приводят к падению тяги двигателя до нуля. Наибольшая рабочая скорость двигателя может быть увеличена путём охлаждения попадающего в воздухосборник воздуха, использованием форсажной камеры или применением гибридной схемы двигателя ТРД/ПВРД .
Самолёты с ПВРД конструктивно проще потому, что такой двигатель оказывает меньшее сопротивление проходящему воздуху ( трение ) и содержит меньше деталей, которые должны функционировать при высокой температуре. В силу меньшего трения ПВРД может обеспечить бо́льшие скорости, но из-за необходимости поступления больших объёмов воздуха в воздуховод без помощи компрессора скорость такого самолёта не может быть менее 600 км / ч . С другой стороны, схема работы ПВРД предполагает торможение приходящего воздуха до дозвуковой скорости для его сжатия, смешивания с топливом и последующего сжигания. Этот процесс приводит к росту проблем вместе с ростом скорости аппарата — ударные волны при торможении газа , поступающего в двигатель при сверхзвуковой скорости, приводит к росту трения, которое, наконец, становится невозможно скомпенсировать тягой двигателя. Так же, как и в случае с турбинными двигателями, этот процесс сопровождается ростом температуры , что снижает эффект от сжигания топлива. Для сохранения производительности двигателя необходимо принять меры по снижению в нём трения и температуры. В зависимости от применяемых конструктивных решений, а также от типа используемого топлива, верхний предел скорости самолёта с СПВРД составляет 4—8М.

Простейший вариант гиперзвукового ПВРД выглядит как пара воронок , которые соединены друг с другом узкими отверстиями. Первая воронка служит воздухозаборником, в наиболее узкой части происходит сжатие входящего воздуха, добавление в него топлива и сжигание смеси, что ещё больше поднимает температуру и давление газа. Вторая воронка формирует сопло, через которое происходит расширение продуктов сгорания и создание тяги. Такая схема позволяет ГПВРД исключить сильное трение и обеспечивает высокую эффективность сгорания при его использовании на скоростях свыше 8М, что достигается путём сохранения практически неизменной скорости проходящего через весь двигатель воздуха. Поскольку по сравнению с СПВРД проходящий газ в гиперзвуковом ПВРД меньше замедляется, он меньше разогревается, и сгорание происходит более эффективно с бо́льшим выделением полезной энергии (смотрите закон Гесса , закон Кирхгофа ). Основная сложность такой схемы состоит в том, что топливо должно быть смешано с воздухом и сожжено за крайне короткое время, и в том, что любое нарушение геометрии двигателя приведёт к большому трению. Расположение ГПВРД под корпусом (фюзеляжем) аппарата предназначено для конвертирования силы трения в подъёмную силу и создания дополнительной подъёмной силы, используя выхлоп двигателя. Это формирует подъёмную силу при гиперзвуковом полете и определяет дизайн гиперзвуковых самолётов.
Любой гиперзвуковой ПВРД имеет топливные инжекторы , камеру сгорания , сопло и воздухозаборник, который сжимает входящий поток воздуха. Иногда двигатель также оснащается ( англ. ), хотя в области фокусирования волн плотности достаточно высока для самодостаточного горения. Другие двигатели используют пирофорные добавки, такие как силаны , с целью обхода проблем с устойчивостью сгорания. Часто используется изолятор между воздухозаборником и камерой сгорания для продления функционирования двигателя.
_Mach_7_computational_fluid_dynamic_(CFD).jpg)
В случае ГПВРД кинетическая энергия воздуха, поступающего в двигатель, является большей по сравнению с энергией, выделяющейся в результате сгорания топлива в атмосферном воздухе. При скорости 25 М тепло, выделяющееся в результате сгорания топлива, составляет около 10 % от общей энтальпии потока. Вне зависимости от используемого топлива, кинетическая энергия воздуха и теоретическая полезная тепловая энергия от сгорания топлива будут равняться друг другу примерно при скорости 8М. Таким образом, конструкция ГПВРД преследует прежде всего цель уменьшения трения, а не увеличения тяги.
Высокая скорость делает сложным управление потоком внутри камеры сгорания (КС). Так как приходящий воздушный поток является сверхзвуковым, нет обратного распространения процессов, происходящих в КС. Это не позволяет регулировать тягу изменением размера входа в сопло (КС). Более того, весь газ, проходящий со сверхзвуковой скоростью через камеру сгорания, должен с минимальным трением смешаться с топливом и иметь достаточно времени для сгорания с целью последующего расширения в сопле и создания тяги. Это налагает сильные ограничения на давление и температуру потока и требует, чтобы впрыск и смешивание топлива были чрезвычайно эффективны. Рабочие значения давления лежат в диапазоне 20—200 КПa (0,2—2 атмосфер ) и при этом под давлением понимается:
где q — динамическое давление ; ρ ( ро ) — плотность ; v — скорость .
Для того, чтобы поддерживать скорость сгорания постоянной, давление и температура в двигателе также должны быть постоянными. Это проблематично, так как управление воздушным потоком в таком двигателе технически невозможно, что означает ограничение высоты и скорости или соответствующего динамического давления, при которых конкретный ГПВРД способен (предназначен) функционировать. Таким образом, для соблюдения этого требования такой аппарат должен набирать высоту при наборе скорости. Оптимальная траектория набора высоты и спуска называется траекторией постоянного динамического давления (ТПДД, англ. constant dynamic pressure path ,CDPP ). Считается, что аппараты с ГПВРД могут использоваться до высоты 75 км .
Порядок впрыска топлива также является потенциально сложной инженерной проблемой. Одна из возможных схем циркуляции топлива выглядит следующим образом: топливо сжимается до 100 атмосфер турбонасосом, нагревается фюзеляжем, проходит через турбину насоса, и, затем, оставшаяся часть давления используется инжекторами для впрыска топлива со скоростью, бо́льшей скорости проходящего воздушного потока в основании камеры сгорания. Потоки топлива образуют сеткоподобную структуру в проходящем потоке воздуха. Высокая турбулентность из-за бо́льшей скорости топлива приводит к дальнейшему перемешиванию. При этом, чем сложнее молекулы топлива (например, как у керосина), тем длиннее должен быть ГПВРД для обеспечения полного сгорания топлива.
Минимальное число Маха, при котором ГПВРД может работать, ограничено тем, что сжатый поток должен быть достаточно горячим для горения топлива и иметь давление, достаточно высокое для завершения реакции до того, как воздушная смесь покинет сопло. Для сохранения принадлежности двигателя к классу ГПВРД, сохранения его свойств и устойчивости работы, поток газа должен сохранять сверхзвуковую скорость на всех участках своего пути в двигателе.
Степень сжатия напрямую связана со степенью торможения потока и определяет нижнюю границу использования. Если газ в двигателе затормаживается до скорости ниже 1М, то двигатель «глохнет», порождая ударные волны , при экспериментах хорошо заметные невооружённым глазом. Внезапное замедление потока воздуха в двигателе может привести к ускорению сгорания в КС, что способно вызвать разрушение (в том числе детонационное) ГПВРД. Кроме сжатия, на нижний предел скорости влияет также увеличение скорости звука в газе при росте температуры. На 2009 год считается, что нижний предел скорости использования «чистого» гиперзвукового ПВРД составляет 6—8М . Существуют проекты конструкций гибридных СПВРД/ГПВРД, которые предполагают трансформацию сверхзвукового двигателя в гиперзвуковой на скоростях М3—6 и имеют более низкое значение нижнего предела скорости, используя дозвуковое сгорание по типу СПВРД.
Высокая стоимость лётных испытаний и невозможность полноценных наземных сдерживает развитие гиперзвуковой авиации. Наземные испытания в основном сосредоточены на частичном моделировании условий полёта и производились в криогенных установках, газодинамических установках на базе ракетных двигателей, ударных тоннелях и плазмогенераторах, но все они лишь приближённо моделируют реальный полёт . Лишь в последнее время в вычислительной гидрогазодинамике было накоплено достаточно экспериментальных данных для реалистичного компьютерного моделирования с целью решения проблем работы аппаратов с ГПВРД, а именно для моделирования приграничного слоя воздуха, смешивания топлива с потоком воздуха, , отрыва (отделения) потока, аэротермодинамики реального газа. Тем не менее, эта область всё ещё остаётся малоизученной. Кроме этого, моделирование кинетически ограниченного сгорания с участием таких быстрореагирующих топлив, как водород , требует значительных вычислительных мощностей. Как правило, используются ограниченные модели с поиском численных решений «жёстких систем» дифференциальных уравнений , для которых необходим малый шаг интегрирования и поэтому требуется много машинного времени.
Большинство экспериментов с гиперзвуковыми ПВРД остаются засекреченными . Несколько групп, включая ВМС США с двигателем «SCRAM» ( 1968 — 1974 ), Boeing с аппаратом «Hyper-X» , утверждают об удачном выполнении полётов с использованием ГПВРД. Индия сообщила об испытаниях гиперзвукового прямоточного воздушно-реактивного двигателя (SCRAMJET) в сентябре 2016 года .
Окончательный вариант дизайна гиперзвукого ПВРД, вероятно, будет гибридным двигателем с расширенным диапазоном рабочих скоростей:
ГРД должны иметь гораздо бо́льший диапазон допустимого динамического давления и скорости.
В отличие от обычной ракеты, которая быстро и практически вертикально пролетает через атмосферу, или самолёта, который летает на гораздо ме́ньшей скорости, гиперзвуковой аппарат должен следовать траектории, которая обеспечивает режим работы ГПВРД, оставаясь в атмосфере при гиперзвуковой скорости. Аппарат с ГПВРД имеет в лучшем случае посредственное отношение тяги к весу аппарата, поэтому его ускорение мало́ по сравнению с ракетами-носителями . Таким образом, время, проводимое в атмосфере такой космической системой, должно быть значительным и составлять от 15 до 30 мин. По аналогии с теплозащитой для аэродинамического торможения Спейс Шаттла при входе в атмосферу , теплозащита такой системы должна быть также значительной. Общее время аппарата в атмосфере при гиперзвуковых скоростях является более продолжительным по сравнению с одноразовой возвращаемой капсулой, но менее продолжительным по сравнению с космическим челноком.
Новые материалы предлагают хорошее охлаждение и теплозащиту при высоких температурах , но, как правило, относятся к абляционным материалам, которые постепенно теряются при использовании, унося с собой тепло. Таким образом, исследования в основном фокусируются на активном охлаждении корпуса, в которых хладагент принудительно циркулирует в «теплонапряжённых» частях корпуса, отводя тепло от корпуса и предотвращая его разрушение. Как правило, в качестве теплоносителя предлагается использовать топливо, во многом аналогично тому, как в современных ракетных двигателях используют топливо или окислитель при охлаждении сопла и камеры сгорания (КС). Добавление любой сложной охлаждающей системы приводит к увеличению веса и снижению эффективности системы в целом. Таким образом, необходимость активной системы охлаждения является сдерживающим фактором, снижающим эффективность и перспективность применения ГПВРД.
Производительность космической системы в основном связана с её стартовым весом. Как правило, аппарат проектируется с целью максимизировать радиус действия ( ), высоту орбиты ( ) или долю массы полезной нагрузки ( ) с использованием конкретного двигателя и топлива. Это приводит к компромиссам между эффективностью двигателя, то есть массой топлива, и сложностью двигателя, то есть его сухой массой, что может быть выражено следующим образом:
где — доля массы без топлива, которая имеет в своём составе всю конструкцию, включая топливные баки и двигатели; — доля массы топлива и окислителя, если последний используется, также масса тех материалов, которые будут расходованы в ходе полета и предназначены исключительно для осуществления этого полёта; — первоначальное соотношение масс, которое является обратной величиной к доставляемой по назначению доле полезной нагрузки (ПН).
Использование ГПВРД увеличивает массу двигателя по сравнению с ракетой и уменьшает долю топлива . Поэтому тяжело решить, какая из используемых систем будет иметь преимущество и даст меньшее значение , что означает увеличение полезной нагрузки при той же стартовой массе. Сторонники ГПВРД утверждают, что уменьшение стартовой массы за счёт топлива составит 30 %, а увеличение за счёт добавления гиперзвукового ПВРД составит 10 %. К сожалению, неопределённость при вычислении любой массы в гипотетическом аппарате так велика, что незначительные изменения в прогнозах эффективности или массы ГПВРД могут перевесить чашу весов доли ПН в одну или другую сторону. Кроме этого, необходимо учитывать сопротивление воздуха или трения измененной конфигурации. Трение аппарата может рассматриваться как сумма трения самого аппарата ( ) и трение установленного ГПВРД ( ). Трение установки традиционно получается из трения пилонов и потока в самом двигателе, которое может быть записано в виде понижающего тягу коэффициента:
где — множитель, учитывающий потери на сопротивление воздуха и — тяга двигателя без учета трения.
Если ГПВРД интегрирован в аэродинамическое тело аппарата, можно считать, что трение двигателя ( ) является разницей от трения базовой конфигурации аппарата. Общая ( ) может быть представлена в виде значения в интервале от 0 до 1 ( ) в терминах удельного импульса:

где — ускорение свободного падения на земной поверхности; — скорость аппарата; — удельный импульс; — температура горения топлива; — результирующая тяга и — доступная химическая энергия.
Удельный импульс часто используется в качестве показателя эффективности ракет, так как в случае, например, ЖРД имеется прямая связь между удельным импульсом, ( ) и скоростью истечения выхлопных газов. Обычно величина удельного импульса в меньшей степени используется для самолётных двигателей и здесь следует отметить также, что в данном случае и являются функциями от текущей скорости аппарата. Удельный импульс ракетного двигателя не зависит от скорости, но зависит от высоты и достигает наибольших значений в вакууме, где имеет максимальное значение в случае кислородно-водородных ЖРД, составляя на поверхности 360 с, а в вакууме 450 с ( SSME , РД-0120 ). Удельный импульс ГПВРД имеет обратную зависимость от высоты и скорости, достигая максимального значения при минимальной скорости, составляя 1200 с, которое постепенно уменьшается с ростом скорости, хотя эти оценки значительно различаются в литературе. В простом случае одноступенчатого аппарата доля массы топлива может быть выражена следующим образом:
которая может быть выражена в случае одноступенчатой космической системы следующим образом:
или в случае самолётного полета с постоянной скоростью и высотой:
где — радиус действия, который может быть выражен по формуле в терминах радиуса Бреге́ :
— коэффициент подъёмной силы ; — коэффициент аэродинамического сопротивления . Последняя формула допускает реализацию одноступенчатой космической системы.
Гиперзвуковые самолёты имеют немного или совсем лишены движущихся частей. Большинство составляющих частей представляют собой непрерывно переходящие друг в друга поверхности. С простыми топливными насосами и спускаемым аппаратом в виде самого самолёта, разработка аппарата с ГПВРД имеет тенденцию быть менее материалоёмким и более простым на этапе конструирования по сравнению с другими типами космических систем.
Гиперзвуковой самолёт не может произвести достаточно тяги до тех пор, пока не будет разогнан до скорости М≈5, хотя в зависимости от конструкции, как упоминалось выше, возможен вариант гибридного СПВРД/ГПВРД, который может работать на меньшей скорости. Тем не менее, самолёт с горизонтальным взлётом должен быть оснащён дополнительными ТРД или ракетными ЖРД для взлёта и начального набора высоты и разгона. Также необходимо будет топливо для этих двигателей со всеми необходимыми им системами. Так как вариант с тяжёлыми ТРД не сможет разогнаться до скорости М>3, нужно выбрать другой способ ускорения в этом диапазоне скоростей, а именно сверхзвуковые СПВРД или ракетные ЖРД. Они также должны будут иметь своё топливо и системы. Вместо этого для первоначальной стадии полёта существуют предложения использования первой ступени в виде твердотопливного ракетного ускорителя , отделяющегося после достижения достаточной для работы ГПВРД скорости. Также предлагается использовать специальные самолёты-ускорители.
В отличие от реактивных и ракетных двигательных систем, которые могут быть испытаны на земле, испытания гиперзвуковых самолётов требуют исключительно дорогих экспериментальных установок или стартовых комплексов, которые ведут к большим затратам при разработке. Запускаемые экспериментальные модели обычно разрушаются в ходе или после завершения испытаний, что исключает их повторное использование.
Наиболее успешно испытывается российская ракета « Циркон » (ракета достигла 8М при полете на высоте более 20 км), вторая ступень которой имеет прямоточный воздушно-реактивный двигатель.
Особую подгруппу ГПВРД представляют ядерные ГПВРД. Как и любой ядерный реактивный двигатель , ядерный ГПВРД вместо камеры сгорания оснащён камерой разогрева рабочего тела. Также, в отличие от химических ГПВРД, ядерные ГПВРД используют в качестве рабочего тела только атмосферный воздух. Следовательно, в принципе самолёт с ядерным ГПВРД вовсе не нуждается в бортовых запасах рабочего тела. Но, как и неядерный ГПВРД, ядерный ГПВРД не может работать на скоростях ниже нижнего предела (около 4—5М).
Однако возможно создание трёхрежимной гиперзвуковой ядерной двигательной установки (ЯДУ). На скоростях значительно ниже нижнего предела (а тем более на нулевых) такая ЯДУ работает в «ракетном режиме», используя бортовые запасы рабочего тела.
На скоростях, значительно превышающих взлётно-посадочные, но недостаточных для работы в режиме ГПВРД, такая ЯДУ работает в «смешанном режиме», частично используя атмосферный воздух, частично — бортовой запас рабочего тела, причём пропорция в данном случае зависит от полётной скорости: чем выше скорость, тем больше доля атмосферного воздуха в рабочем теле и тем меньше в двигатель подаётся рабочего тела из бортовых запасов.
Наконец, на скоростях не ниже 5М ЯДУ работает в режиме ГПВРД, используя только атмосферный воздух. Естественно, «ракетный режим» и «смешанный режим» используется только в качестве взлётно-посадочных и для разгона до минимальной крейсерской скорости (в данном случае около 5М), тогда как в качестве крейсерского, естественно, используется режим ГПВРД. (Ядерный воздушно-космический самолёт использует «ракетный режим» в качестве крейсерского только вне атмосферы.)
Как следствие, отпадает необходимость в оснащении ядерного гиперзвукового самолёта дополнительной разгонной ДУ. С другой стороны, эффективный бортовой запас рабочего тела для маршевой ЯДУ при той же ёмкости баков получается вдвое большим, чем в случае с химической маршевой ДУ. Также в качестве малых маневровых двигателей (в том числе в качестве двигателей ориентации) на воздушно-космических самолётах можно применить электрические ракетные двигатели, использующие то же рабочее тело, что и маршевая ЯДУ. То есть возможно создание бортовой объединённой ДУ (ОДУ).
В результате ядерный гиперзвуковой самолёт получается сравнительно простым конструктивно и технологичным и, даже несмотря на сравнительно большую массу маршевой ЯДУ, более лёгким, чем неядерный аналог. Также ЯДУ и электрические ракетные двигатели потенциально имеют на порядок больший эксплуатационный ресурс, чем химические реактивные двигатели (в том числе ракетные и ГПВРД).
Таким образом, создание гиперзвукового или воздушно-космического ядерного самолёта теоретически может оказаться более простой конструкторской задачей, чем создание неядерного аналога, и вместе с тем обойтись сравнительно недорого (самая сложная и дорогостоящая подзадача — создание приемлемой маршевой гиперзвуковой ЯДУ). Также гиперзвуковой или воздушно-космический ядерный самолёт может получиться более простым и дешёвым в эксплуатации, чем неядерный аналог. Проблемы безопасности эксплуатации такого самолёта (безопасности полётов, безопасности утилизации отработанного ядерного топлива и выработавших ресурс маршевых ЯДУ) также вполне решаемы [ источник не указан 2265 дней ] .
|
|
|
|---|
|
||||||||||||||||||
|
||||||||||||||||||
|
||||||||||||||||||
|
||||||||||||||||||
|
||||||||||||||||||
|
||||||||||||||||||
|
||||||||||||||||||