Астрофизическая информационная система НАСА
- 1 year ago
- 0
- 0



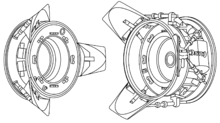
Система стыковки НАСА ( англ. NASA Docking System , сокр. NDS) — международный пассивно-активный стыковочный механизм , разработанный для будущего полета человека в космос на Многоцелевом пилотируемом корабле «Орион» и для коммерческих пилотируемых кораблей ( Crew Dragon , CST-100 и др). Это первая попытка Многостороннего координационного совета Международной космической станции по практической реализации Международного стандарта стыковочной системы . Система стыковки НАСА также известна как Международная стыковочная система слабого столкновения (англ.) international Low Impact Docking System (iLIDS) .
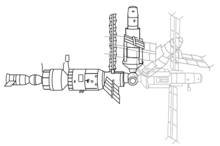
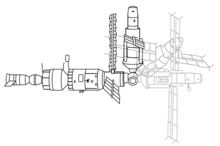
Два Международных стыковочных адаптера ( англ. International Docking Adapters , сокр. IDA) присоединены к Герметичным стыковочным переходникам на переднем и зенитном стыковочных узлах модуля Гармония (Node-2) , соединяя АПАС-95 станции с Системой стыковки НАСА пристыковывающихся кораблей .
Система стыковки НАСА андрогинная , первый узел использует технологию Стыковочной системы слабого столкновения, а также позволяет не только быть активным в паре стыкуемых узлов, но и выполнять роль пассивного причала . Он поддерживает как автоматические, так и пилотируемые стыковки. Кроме того имеет возможность пиротехнической (взрывной) расстыковки в особых случаях. Соединённые пары интерфейсов позволяют передавать электроэнергию, данные, команды, воздух и поддерживать телекоммуникационную связь. В будущих реализациях они также смогут передавать воду, топливо, окислитель , а также поддерживать гидравлику. Проход для экипажа и груза имеет диаметр 800 миллиметров (31 ″).
По внешнему виду и функциям Система стыковки НАСА имеет некоторое сходство с системой АПАС-95, механизм которой уже используется на Герметичных стыковочных переходниках (PMA) , уже закрепленных на Международной космической станции , но не полностью совместима с ней.

В 1996 году Космический центр имени Линдона Джонсона приступил к разработке усовершенствованной системы причала и стыковки, , которую позже будут называть Стыковочная система слабого столкновения X-38 . Даже после того, как проект X-38 был отменен в 2002 году, разработка системы стыковки продолжилась, но её будущее оставалось неизвестным . НАСА в 2005 году рекомендовало использовать Стыковочную систему слабого столкновения для экипажа исследовательского корабля (который позже был назван «Орион») . Также, в миссии STS-125 , на космический телескоп Хаббл был установлен механизм мягкого захвата. К этому захвату в будущем, когда телескоп Хаббл окончательно выйдет из строя, будет пристыкован космический возвращаемый аппарат, который аккуратно спустит телескоп с орбиты. Механизм мягкого захвата создаёт негерметичную стыковку , но позволяет осуществить захват кораблём «Орион». Стыковочное кольцо было установлено на кормовую переборку Хаббла

В феврале 2010 года программа LIDS стала приводиться к требованиям МССС и стала известна как Международная стыковочная система слабого столкновения, англ. international Low Impact Docking System (iLIDS) или просто Система стыковки НАСА . В мае 2011 года, критический анализ проекта был завершён и к концу 2013 года ожидалось его окончательное утверждение.
IDA-1 являлся частью полезной нагрузки миссии SpaceX CRS-7 в июне 2015 года, но был утрачен, когда ракета Falcon 9 взорвалась во время подъема . IDA-2 был доставлен на МКС миссией SpaceX CRS-9 . Адаптер IDA-3 был доставлен на МКС 27 июля 2019 года грузовиком Dragon миссии SpaceX CRS-18