Угловое ускорение характеризует интенсивность изменения модуля и направления угловой скорости при движении
твёрдого тела
.
Содержание
Как приходят к понятию углового ускорения: ускорение точки твёрдого тела при свободном движении
К понятию углового ускорения можно прийти, рассматривая вычисление ускорения точки твёрдого тела, совершающего свободное движение. Скорость точки тела
при свободном движении, согласно
формуле Эйлера
, равна
где
— скорость точки тела
, принятой в качестве полюса;
— псевдовектор угловой скорости тела;
— вектор, выпущенный из полюса в точку, скорость которой вычисляется. Дифференцируя по времени данное выражение и используя формулу Ривальса
, имеем
где
— ускорение полюса
;
— псевдовектор углового ускорения. Составляющая ускорения точки
, вычисляемая через угловое ускорение называется
вращательным ускорением
точки
вокруг полюса
Последнее слагаемое в полученной формуле, зависящее от угловой скорости, называют
осестремительным ускорением
ускорением точки
вокруг полюса
Псевдовектор
направлен по касательной к
годографу
угловой скорости. Действительно, рассмотрим два значения вектора угловой скорости, в момент времени
и в момент времени
. Оценим изменение угловой скорости за рассматриваемый промежуток времени
Отнесём это изменение к тому промежутку времени, за которое оно произошло
Получившийся вектор называется вектором среднего углового ускорения. Он занимает положение секущей, пересекая годограф вектора угловой скорости в точках
и
. Перейдём к пределу при
Вектор среднего углового ускорения перейдёт в вектор мгновенного углового ускорения и займёт положение касательной в точке
к годографу угловой скорости.
Выражение вектора углового ускорения через параметры конечного поворота
При рассмотрении вращения тела через параметры конечного поворота, вектор углового ускорения можно расписать формулой
где
— орт, задающий направление оси поворота;
— угол, на который совершается поворот вокруг оси
.
Угловое ускорение при вращении тела вокруг неподвижной оси
При вращении тела вокруг неподвижной оси, проходящей через неподвижные точки тела
и
, производные орта оси вращения равны нулю
В этом случае вектор углового ускорения определяется тривиально через вторую производную угла поворота
или
где
— алгебраическая величина углового ускорения. В этом случае псевдовектор углового ускорения, как и угловая скорость, направлен вдоль оси вращения тела. Если первая и вторая производные угла поворота имеют одинаковый знак
(
),
то вектор углового ускорения и вектор угловой скорости совпадают по направлению (тело вращается ускоренно). В противном случае, при
, векторы угловой скорости и углового ускорения направлены в противоположные стороны (тело вращается замедленно).
В курсе
теоретической механики
традиционным является подход, при котором понятие угловой скорости и углового ускорения вводится при рассмотрении вращения тела вокруг неподвижной оси. При этом в качестве закона движения рассматривается зависимость от времени угла поворота тела
В этом случае закон движения точки тела может быть выражен естественным способом, как длина дуги окружности, пройденная точкой при повороте тела от некоторого начального положения
где
— расстояние от точки до оси вращения (радиус окружности, по которой движется точка). Дифференцируя последнее соотношение по времени получаем алгебраическую скорость точки
где
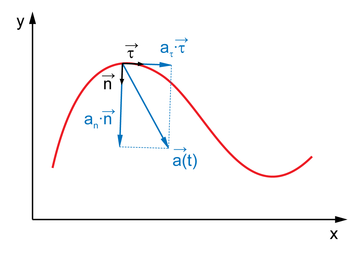
— алгебраическая величина угловой скорости. Ускорение точки тела при вращении может быть представлено как геометрическая сумма тангенциального и нормального ускорения
причём тангенциальное ускорение получается как производная от алгебраической скорости точки
где
— алгебраическая величина углового ускорения. Нормальное ускорение точки тела может быть вычислено по формулам
Выражение псевдовектора углового ускорения через тензор поворота тела
Если поворот твёрдого тела задан тензором ранга
(
линейным оператором
), выраженным, например, через параметры конечного поворота
В.И. Дронг, В.В. Дубинин, М.М. Ильин и др.; под ред. К.С. Колесникова, В.В. Дубинина.
Курс теоретической механики: учебник для вузов. — 2017. — С. 101, 111. — 580 с. —
ISBN 978-5-7038-4568-4
.
Литература
Тарг С. М. Краткий курс теоретической механики — 10-е изд., перераб. и доп. — М.: Высш. шк., 1986 — 416 С.
Погорелов Д. Ю. Введение в моделирование динамики систем тел: Учебное пособие. — Брянск: БГТУ, 1997. — 197 С.