 (СИ, СГС)
(СИ, СГС)
 (
(
 (
(
 (СИ, СГС)
(СИ, СГС)
 (СИ)
(СИ)
 (СГС)
(СГС)
 — вектор магнитной индукции,
— вектор магнитной индукции,
 — вектор
— вектор
 —
—
 —
—
 — элемент контура интегрирования,
— элемент контура интегрирования,
 — векторный элемент площадки. Интегрирование в левых частях формул для
— векторный элемент площадки. Интегрирование в левых частях формул для
 выполняется по произвольному замкнутому контуру, а в правых по произвольной поверхности, натянутой на этот контур.
выполняется по произвольному замкнутому контуру, а в правых по произвольной поверхности, натянутой на этот контур.
 (СИ)
(СИ)
 (СГС),
(СГС),
 —
—
 —
—
 ; для вакуума
; для вакуума
 ).
).
 ,
,
 , где
, где
 — расстояние от некоей оси,
— расстояние от некоей оси,
 — орт вдоль этой оси) возможны аналитические решения. Для ситуации вакуума есть особые техники расчета.
— орт вдоль этой оси) возможны аналитические решения. Для ситуации вакуума есть особые техники расчета.
 , если элемент линейный,
, если элемент линейный,
 , если объёмный):
, если объёмный):
![{\displaystyle d{\vec {B}}={\frac {\mu _{0}I}{4\pi }}{\frac {\left[d{\vec {l}}\times {\vec {r}}\right]}{r^{3}}}\,}](/images/000/359/359008/27.jpg?rand=936345) (СИ)
(СИ)
![{\displaystyle \qquad d{\vec {B}}={\frac {I}{c}}{\frac {\left[d{\vec {l}}\times {\vec {r}}\right]}{r^{3}}}\,}](/images/000/359/359008/28.jpg?rand=540724) (СГС)
(СГС)
![{\displaystyle d{\vec {B}}={\frac {\mu _{0}}{4\pi }}{\frac {\left[{\vec {j}}dV\times {\vec {r}}\right]}{r^{3}}}\,}](/images/000/359/359008/29.jpg?rand=890156) (СИ)
(СИ)
![{\displaystyle \qquad d{\vec {B}}={\frac {1}{c}}{\frac {\left[{\vec {j}}dV\times {\vec {r}}\right]}{r^{3}}}\,}](/images/000/359/359008/30.jpg?rand=616767) (СГС),
(СГС),
 — вектор, проведённый из элемента тока в точку, где определяется магнитное поле.
— вектор, проведённый из элемента тока в точку, где определяется магнитное поле.
 ,
,
 всюду единице. Однако, чтобы так сделать, нужно было бы в
всюду единице. Однако, чтобы так сделать, нужно было бы в
 охватывать
все
токи (в том числе микротоки, обеспечивающие
охватывать
все
токи (в том числе микротоки, обеспечивающие
 понимается макроскопическое поле, иначе говоря, поле, усреднённое по малому (но всё же содержащему достаточное число молекул) объёму среды. При этом под
понимается макроскопическое поле, иначе говоря, поле, усреднённое по малому (но всё же содержащему достаточное число молекул) объёму среды. При этом под
 подразумевается именно ток проводимости. Молекулярный же ток
подразумевается именно ток проводимости. Молекулярный же ток
 учитывается величиной
учитывается величиной
 , входящей в соотношениe
, входящей в соотношениe
 (CИ)
(CИ)
 (СГС),
(СГС),
 (
(
 (
(
 . Здесь
. Здесь
 —
—
 (СИ) или
(СИ) или
 (СГС).
(СГС).
![{\displaystyle {\vec {F}}=q^{*}\left[{\vec {v}}^{*}\times {\vec {B}}\right]\,}](/images/000/359/359008/47.jpg?rand=989807) (СИ)
(СИ)
![{\displaystyle \qquad {\vec {F}}={\frac {q^{*}}{c}}\left[{\vec {v}}^{*}\times {\vec {B}}\right]\,}](/images/000/359/359008/48.jpg?rand=653410) (СГС),
(СГС),
 и
и
 —
—
 контура с «пробным» током
контура с «пробным» током
 действует магнитное поле) записывается:
действует магнитное поле) записывается:
![{\displaystyle d{\vec {F}}=I^{*}\left[d{\vec {l}}^{*}\times {\vec {B}}\right]\,}](/images/000/359/359008/53.jpg?rand=501887) (CИ)
(CИ)
![{\displaystyle \qquad d{\vec {F}}={\frac {I^{*}}{c}}\left[d{\vec {l}}^{*}\times {\vec {B}}\right]\,}](/images/000/359/359008/54.jpg?rand=76319) (СГС).
(СГС).
 может создаваться неким другим контуром, то есть последняя формула фактически задаёт силу взаимодействия.
может создаваться неким другим контуром, то есть последняя формула фактически задаёт силу взаимодействия.
 и
и
 ).
).
Панас Мирный
- 1 year ago
- 0
- 0

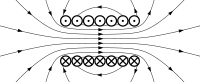
Магнитоста́тика — раздел классической электродинамики , в котором изучаются свойства стационарного магнитного поля (поля постоянных электрических токов или постоянных магнитов ) , рассматриваются способы расчета магнитного поля постоянных токов и анализируется взаимодействие токов посредством создаваемых ими полей.
Реальные электромагнитные поля всегда в какой-то мере изменяются со временем. Для их описания существуют уравнения Максвелла . Под приближением магнитостатики ( случаем магнитостатики ) на практике понимают достаточно медленное изменение полей, чтобы можно было считать их постоянными с приемлемой точностью и оперировать более простыми уравнениями.
Магнитостатика вместе с электростатикой представляют собой подобласти электродинамики; их подходы можно использовать совместно и независимо, поскольку расчет электрического и магнитного полей в этом случае не имеет взаимозависимостей.
В рамках магнитостатики изучается как ситуация вакуума , так и ситуация магнитной среды — магнетика . При этом любая среда рассматривается макроскопически, то есть поля на атомных масштабах усредняются, молекулярные токи и магнитные моменты рассматриваются только в их совокупности.
Основу теоретического аппарата магнитостатики составляют два уравнения Максвелла, которые могут быть записаны в дифференциальной:
или интегральной:
форме. Здесь — вектор магнитной индукции, — вектор напряжённости магнитного поля , — плотность тока проводимости, — скорость света в вакууме, — элемент контура интегрирования, — векторный элемент площадки. Интегрирование в левых частях формул для выполняется по произвольному замкнутому контуру, а в правых по произвольной поверхности, натянутой на этот контур.
Напряжённость и вектор индукции связаны соотношением
где — магнитная постоянная , — магнитная проницаемость среды (в общем случае зависящая от координат, а иногда и от величины ; для вакуума ).
В общем случае, поле в задачах магнитостатики при известном распределении токов находится по выписанным выше формулам. Обычно для этого требуются численные методы, но в ситуациях высокой симметрии (скажем, для цилиндирчески-симметричных плотностей токов и магнитных свойств среды: , , где — расстояние от некоей оси, — орт вдоль этой оси) возможны аналитические решения. Для ситуации вакуума есть особые техники расчета.
Для вакуума магнитостатическое поле может быть вычислено с применением закона Био — Савара , задающего величину магнитного поля, генерируемого в данной точке элементом тока ( , если элемент линейный, , если объёмный):
где — вектор, проведённый из элемента тока в точку, где определяется магнитное поле.
Уравнения магнитостатики для вакуума линейны , что позволяет использовать принцип суперпозиции :
то есть осуществлять суммирование (интегрирование) по вкладам отдельных элементов в поле.
Для расчёта магнитного поля в магнитостатике можно пользоваться (и часто это весьма удобно) понятием магнитного заряда , вводящим аналогию магнитостатики с электростатикой и позволяющим применять в магнитостатике формулы, аналогичные формулам электростатики — но не для электрического, а для магнитного поля. Обычно (за исключением случая теоретического рассмотрения гипотетических магнитных монополей ) подразумевается лишь чисто формальное использование, так как в реальности магнитные заряды не обнаружены. Такое формальное использование (фиктивных) магнитных зарядов возможно благодаря теореме эквивалентности поля магнитных зарядов и поля постоянных электрических токов . Фиктивные магнитные заряды можно использовать при решении разных задач как в качестве источников магнитного поля, так и для определения действия внешних магнитных полей на магнитное тело (магнит, катушку).
С микроскопической точки зрения среда состоит из частиц (молекул и др.), находящихся в вакууме. Гипотетически можно было бы всегда пользоваться уравнениями Максвелла для вакуума, приравняв всюду единице. Однако, чтобы так сделать, нужно было бы в охватывать все токи (в том числе микротоки, обеспечивающие магнитную поляризацию вещества (молекулярные токи), которые обычно заранее неизвестны. Из-за этого, в частности, сфера применения закона Био—Савара ограничена только ситуацией отсутствия среды.
Поэтому в магнитостатике (и в электродинамике вообще) принят иной подход, когда под полем понимается макроскопическое поле, иначе говоря, поле, усреднённое по малому (но всё же содержащему достаточное число молекул) объёму среды. При этом под подразумевается именно ток проводимости. Молекулярный же ток учитывается величиной намагниченности , входящей в соотношениe
где
Формально, получается, что всё, касающееся конкретной среды, «спрятано» в единственную зависимость — зависимость намагниченности от намагничивающего поля (то есть, в принципе, в одну-единственную формулу) вида . Здесь — магнитная восприимчивость (не обязательно постоянная), при этом (СИ) или (СГС).
Выражение для силы Лоренца (силы, с которой на движущуюся заряженную частицу действует магнитное поле) имеет вид
где и — величина заряда и скорость заряженной частицы, играющей в этом контексте роль пробного тела .
Формула для силы Ампера (с которой на элемент контура с «пробным» током действует магнитное поле) записывается:
Реально поле может создаваться неким другим контуром, то есть последняя формула фактически задаёт силу взаимодействия.
Выражения, описывающие действие поля на движущийся заряд (силы Лоренца) или на ток (силы Ампера), для магнитных сред и для вакуума имеют один и тот же вид.