Interested Article - Робот
- 2021-02-01
- 1
Ро́бот ( чеш. robot , от robota — «подневольный труд») — автоматическое устройство, предназначенное для осуществления различного рода механических операций, которое действует по заранее заложенной программе .
Робот обычно получает информацию о состоянии окружающего пространства посредством датчиков (технических аналогов органов чувств живых организмов). Робот может самостоятельно осуществлять производственные и иные операции, частично или полностью заменяя труд человека . При этом робот может как иметь связь с оператором , получая от него команды (ручное управление), так и действовать автономно, в соответствии с заложенной программой (автоматическое управление).
Назначения роботов могут быть самыми разнообразными, от увеселительных и прикладных и до сугубо производственных . Внешний вид роботов разнообразен по форме и содержанию, может быть каким угодно, хотя нередко в конструкциях узлов заимствуют элементы анатомии различных живых существ, подходящие для выполняемой задачи.
В информационных технологиях «роботами» также называют некоторые автономно действующие программы , например, боты или поисковые роботы .

История возникновения слова
Слово «робот» было предложено чешским художником Йозефом Чапеком и использовано его братом, писателем Карелом Чапеком , — впервые в пьесе « Р. У. Р. » («Россумские универсальные роботы», 1920 ). Вот как сам Карел Чапек это описывает: «…в один прекрасный день …автору пришёл в голову сюжет …пьесы. И пока железо было горячо, он прибежал с новой идеей к своему брату Йозефу, художнику, который в это время стоял у мольберта… Автор изложил сюжет так коротко, как только мог… „Но я не знаю, — сказал автор, — как мне этих искусственных рабочих назвать. Я бы назвал их лаборжи [по-видимому, от английского слова labour — П. Б.], но мне кажется, что это слишком книжно“. „Так назови их роботами“, пробормотал художник, …продолжая грунтовать холст…» В ранних русских переводах использовалось слово «работарь» .
Предыстория
Мифические искусственные существа
Идея искусственных созданий впервые упоминается в древнегреческом мифе о Кадме , который, убив дракона, разбросал его зубы по земле и закопал их, из зубов выросли солдаты, и в другом древнегреческом мифе о Пигмалионе , который вдохнул жизнь в созданную им статую — Галатею . Также в мифе про Гефеста рассказывается, как он создал себе различных слуг. Еврейская легенда рассказывает о глиняном человеке — Големе , который был оживлён пражским раввином Йехудой бен Бецалелем при помощи каббалистической магии .
Похожий миф излагается в скандинавском эпосе Младшая Эдда . Там рассказывается о глиняном гиганте Мёккуркальви , созданном троллем Хрунгниром для схватки с Тором , богом грома.
Технические устройства
Сведения о первом практическом применении прообразов современных роботов — механических людей с автоматическим управлением — относятся к эллинистической эпохе. Тогда на маяке, сооружённом на острове Фарос , установили четыре позолоченные женские фигуры. Днём они горели в лучах солнца, а ночью ярко освещались, так что всегда были хорошо видны издалека. Эти статуи через определённые промежутки времени, поворачиваясь, отбивали склянки; в ночное же время они издавали трубные звуки, предупреждая мореплавателей о близости берега .
Прообразами роботов были также механические фигуры, созданные арабским учёным и изобретателем Аль-Джазари (1136—1206). Так, он создал лодку с четырьмя механическими музыкантами, которые играли на бубнах, арфе и флейте.
Чертёж человекоподобного робота был сделан Леонардо да Винчи около 1495 года . Записи Леонардо, найденные в 1950-х , содержали детальные чертежи механического рыцаря, способного сидеть, раздвигать руки, двигать головой и поднимать забрало. Дизайн, скорее всего, основан на анатомических исследованиях, записанных в Витрувианском человеке . Неизвестно, пытался ли Леонардо построить робота .
В XVI—XVIII веках в Западной Европе получило значительное распространение конструирование автоматонов — заводных механизмов, внешне напоминающих человека или животных и способных иногда выполнять достаточно сложные движения. В коллекции Смитсоновского института имеется один из наиболее ранних образцов таких автоматонов — «испанский монах» (примерно 40 см в высоту), способный прогуливаться, ударяя себя в грудь правой рукой и кивая головой; периодически он подносит находящийся в его левой руке деревянный крест к губам и целует его. Считается, что этот автоматон был изготовлен примерно в 1560 году механиком для императора Карла V .
С начала XVIII века в прессе начали появляться сообщения о машинах с «признаками разума», однако в большинстве случаев выяснялось, что это мошенничество. Внутри механизмов скрывались живые люди или дрессированные животные.
Французский механик и изобретатель Жак де Вокансон создал в 1738 году первое работающее человекоподобное устройство ( андроид ), которое играло на флейте. Он также изготовил механических уток, которые, как говорили, умели клевать корм и «испражняться».
Хронология
- Конец XIX века — русский инженер Пафнутий Чебышёв придумал механизм — стопоход , обладающий высокой проходимостью.
- 1898 год — Никола Тесла разработал и продемонстрировал миниатюрное .
- XX век
- 1921 год — чешский писатель Карел Чапек представил публике пьесу под названием « Р. У. Р. » (« Р оссумские У ниверсальные Р оботы») , откуда и взяло начало слово «робот» (от словацк. robota ).
- 1930-е годы — появились конструкции внешне ассоциирующиеся с человеком устройств, способных выполнять простейшие движения и воспроизводить фразы по команде человека. Имеются подтверждённые данные о 38-ми подобных роботах, созданных преимущественно компанией Вестингауз немецкими и голландскими инженерами в целях рекламы. Первый такой «робот» Televox был сконструирован американским инженером Ройем Уэнсли ( англ. Roy J. Wensley ) для Всемирной выставки в Нью-Йорке в 1927 году .
- 1950-е годы — для работы с радиоактивными материалами стали разрабатывать механические манипуляторы, которые копировали движения рук человека, находящегося в безопасном месте.
- 1960 год — дистанционно управляемая тележка с манипулятором, телекамерой и микрофоном применялась для осмотра местности и сбора проб в зонах высокой радиоактивности.
- 1968 год — японская компания Kawasaki Heavy Industries, Ltd. получила лицензию на производство робота от американской фирмы Unimation Inc. и собрала своего первого промышленного робота. С тех пор Япония начала неуклонное движение к тому, чтобы стать мировой столицей роботов — с более чем 130 компаниями, вовлечённых в их производство. Изначально сконструированные в США, первые роботы Японии импортировались в малых количествах. Инженеры изучали их и применяли в производстве в таких специфических работах, как сварка и распыление. В 70-х годах были разработаны многочисленные возможности практического применения в данной области.
- 1979 год — в МГТУ им. Н. Э. Баумана по заказу КГБ был создан аппарат для обезвреживания взрывоопасных предметов — сверхлёгкий мобильный робот .
- 1980-е
- 1980 год — коммерческое начало для роботов, производимых на основе высоких технологий ( Япония ). С этого момента рынок начал расти.
- 1982 год — 18—27 октября 1982 года в Ленинграде , в выставочном комплексе в Гавани проходила (вероятно, первая в СССР) Международная выставка «Промышленные роботы-82».
- 1986 год — в Чернобыле впервые в СССР применены роботы для очистки радиоактивных отходов.
- 2000-е
В середине 2000-х Япония занимает первое место в мире и по экспорту промышленных роботов.
- 2007 год — МВД России в Перми проводило испытания тестового робота-милиционера Р-БОТ 001 .
- 2010 год — в США в продажу поступили новые роботы .
2010-е
- 2011 год — доставлен на МКС робот НАСА Робонавт -2.
- 2013 год — создан и доставлен на МКС первый японский робот-астронавт .
2020-е
Роботы все больше походят на человека. Прогресс сразу в нескольких областях — компьютером зрении, машинном обучении, создании небольших, но мощных микросхемах для роботов, создании ИИ способном думать и осмысливать свои слова lambda. Нейронные сети становятся очень распространены.
- Создан робот Ай-Да который сам рисует свои картины на холсте.
- Создан робот Ameca копирующий естественные человеческие движения и разговор.
Типы роботов
«Современные роботы, созданные на базе самых последних достижений науки и техники, применяются во всех сферах человеческой деятельности. Люди получили верного помощника, способного не только выполнять опасные для жизни человека работы, но и освободить человечество от однообразных рутинных операций».
— И. М. Макаров , . «Робототехника: История и перспективы»
По строению
В соответствии с конструкцией, роботы могут делиться на два следующих типа:
- Андроид — человекообразный робот;
- Биоробот — человек или животное, у которого вместо мозга вставлен имплантат (процессор), всё остальное тело — органическое. [ источник не указан 741 день ]
По ISO
В соответствии с классификацией Международной организации по стандартизации , роботы делятся на два следующих типа:
- Промышленный робот
Появление станков с числовым программным управлением ( ЧПУ ) привело к созданию программируемых манипуляторов для разнообразных операций по загрузке и разгрузке станков. Появление в 1970-х годах микропроцессорных систем управления и замена специализированных устройств управления на программируемые контроллеры позволили снизить стоимость роботов в три раза, сделав рентабельным их массовое внедрение в промышленности .
- Сервисный робот
Сервисный робот помогает людям, выполняя рутинную, удаленную, опасную или повторяющуюся работу, включая работу по дому. Как правило, они автономны и/или управляются встроенной системой управления с возможностью ручного управления. Международная организация по стандартизации определяет «сервисного робота» как робота, «который выполняет полезные задачи для людей или оборудования, исключая приложения промышленной автоматизации».
По назначению
В соответствии с выполняемой функцией роботы могут быть названы следующими типами :
- Транспортный робот
- Бытовой робот
- Боевой робот
- Аптечный робот
- Микроробот
- Наноробот
- Персональный робот
- Социальный робот
- Секс-робот

Роботы для обеспечения безопасности
Роботы широко применяются полицией , органами государственной безопасности , аварийно-спасательными службами , силами ведомственной и вневедомственной охраны . В 2007 году в Перми прошли первые испытания российского робота-полицейского Р-БОТ 001 , разработанного московской компанией «Лаборатория Трёхмерного Зрения» . При тушении пожаров применяют роботизированные установки пожаротушения . Для оперативной разведки агентства по чрезвычайным ситуациям и полиция используют «летающих роботов» — ( беспилотные летательные аппараты ) . При проведении под водой обследования потенциально опасных объектов и поисково-спасательных работ службы МЧС России используют подводные роботы серии « Гном », выпускаемые с 2001 года московской компанией «Подводная робототехника» .
Боевые роботы

Боевым роботом называют автоматическое устройство, заменяющее человека в боевых ситуациях или при работе в условиях, несовместимых с возможностями человека, в военных целях: разведка , боевые действия, разминирование и т. п. Боевыми роботами являются не только автоматические устройства с антропоморфным действием, которые частично или полностью заменяют человека, но и действующие в воздушной и водной среде, не являющейся средой обитания человека (авиационные беспилотные с дистанционным управлением, подводные аппараты и надводные корабли). Большинство боевых роботов являются устройствами телеприсутствия , и лишь очень немногие модели имеют возможность выполнять некоторые задачи автономно, без вмешательства оператора.
В Технологическом институте Джорджии под руководством профессора Хенрика Кристенсена разработаны напоминающие муравьёв инсектоморфные роботы, способные обследовать здание на предмет наличия там врагов и мин-ловушек. Получили распространение в войсках и летающие роботы . На начало 2012 года военными во всём мире использовалось около 10 тысяч наземных и 5 тысяч летающих роботов; 45 стран мира разрабатывало или закупало военных роботов .
В 2015 году на военной базе морских пехотинцев Куантико в США были проведены испытания прототипа робота-собаки Spot, разработанного двумя годами ранее компанией Boston Dynamics для использования в войсках для разведки, патрулирования и переноски грузов. Во время тестов робот обследовал помещения на предмет нахождения в них противника и передавал данные об обнаруженных целях на пульт оператора .
Роботы-учёные
Первые роботы-учёные Адам и Ева были созданы в рамках проекта Robot Scientist университета Аберистуита и в 2009 году одним из них было совершено первое научное открытие .
К роботам-учёным можно отнести роботов, с помощью которых исследовались вентиляционные шахты Большой Пирамиды Хеопса и были открыты т. н. «дверки Гантенбринка» и «ниши Хеопса». [ источник не указан 2921 день ]
Роботы-учителя
Один из первых образцов робота-учителя был разработан в 2016 году молодыми учёными Томского политехнического университета . В мае 2016 года пресс-служба университета сообщила, что с помощью мобиробота учащиеся лицея при вузе смогут получать теоретические и практические знания по математике, физике, химии и информатике начиная с осени того же года .
Технологии
Система передвижения

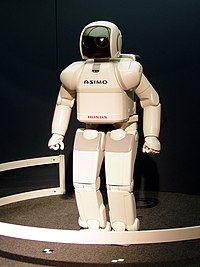
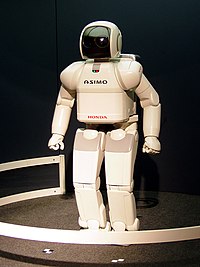
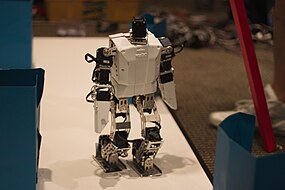
Для передвижения по открытой местности чаще всего используют колёсный или гусеничный движитель (примерами подобных роботов могут служить Warrior и PackBot ). Реже используются шагающие системы (примерами подобных роботов могут служить BigDog и Asimo ). Для неровных поверхностей создаются гибридные конструкции, сочетающие колёсный или гусеничный ход со сложной кинематикой движения колёс. Такая конструкция была применена в луноходе .
Внутри помещений, на промышленных объектах роботы передвигаются вдоль монорельсов , по напольной колее и т. п. Для перемещения по наклонным или вертикальным плоскостям, по трубам используются системы, аналогичные «шагающим» конструкциям, но с вакуумными присосками . Роботы, предназначенные для обследования высоковольтных линий электропередач , имеют в своей верхней части колёсные шасси , перемещающиеся по проводам . Также известны роботы, использующие принципы движения живых организмов — змей , червей , рыб , птиц , насекомых и других; соответственно, говорят о ползающих , инсектоморфных (от лат. Insecta — насекомое) и других типах роботов бионического происхождения.
Система распознавания образов
Системы распознавания уже способны определять простые трёхмерные предметы, их ориентацию и композицию в пространстве, а также могут достраивать недостающие части, пользуясь информацией из своей базы данных (например, собирать конструктор Lego).
Двигатели
В роботах используются двигатели постоянного тока, двигатели внутреннего сгорания, шаговые электродвигатели , сервоприводы . Существуют разработки двигателей, не использующих в своей конструкции моторов: например, технология сокращения материала под действием электрического тока (или поля) (см. электроактивные полимеры ), которая позволяет добиться более точного соответствия движений робота натуральным плавным движениям живых существ. [ источник не указан 2921 день ]
Искусственный интеллект
Американский специалист по ИИ Гэри Маркус указывает, что разработчикам искусственного интеллекта следует держаться как можно дальше от создания систем, которые могут слишком легко выйти из-под контроля. Например, любые работы по созданию роботов, которые могут проектировать и создавать других роботов, должны проводиться с особой тщательностью и только под пристальным наблюдением целого ряда экспертов, поскольку последствия неправильных решений в данной сфере очень трудно прогнозировать .
Технология подзарядки
Разработаны технологии [ кем? ] [ когда? ] , позволяющие роботам самостоятельно осуществлять подзарядку, находя стационарную зарядную станцию и подсоединяясь к ней. [ источник не указан 2921 день ]
Математическая база
Помимо уже широко применяющихся нейросетевых технологий, существуют алгоритмы самообучения взаимодействию робота с окружающими предметами в реальном трёхмерном мире: робот-собака Aibo под управлением таких алгоритмов прошёл те же стадии обучения, что и новорождённый младенец, самостоятельно научившись координировать движения своих конечностей и взаимодействовать с окружающими предметами (погремушками в детском манеже). Это даёт ещё один пример математического понимания алгоритмов работы высшей нервной деятельности человека. [ источник не указан 2921 день ]
Навигация
Системы построения модели окружающего пространства по ультразвуку или сканированием лазерным лучом широко используются в гонках роботизированных автомобилей (которые уже успешно и самостоятельно проходят реальные городские трассы и дороги на пересечённой местности с учётом неожиданно возникающих препятствий). [ источник не указан 2921 день ]
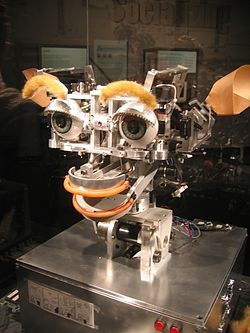
Внешний вид
В Японии не прекращаются разработки роботов, имеющих внешний вид, на первый взгляд неотличимый от человеческого. Развивается техника имитации эмоций и мимики «лица» роботов .
В июне 2009 года учёные Токийского университета представили человекоподобного робота «KOBIAN», способного имитировать эмоции человека — счастье, страх, удивление, грусть, гнев, отвращение — с помощью жестов и мимики. Робот способен открывать и закрывать глаза, двигать губами и бровями, использовать руки и ноги .
Производители роботов
Существуют компании, специализирующиеся на производстве роботов ( iRobot Corporation , Boston Dynamics ). Роботов также выпускают некоторые компании, работающие в сфере высоких технологий : ABB , Honda , Mitsubishi , Sony , MKOIS, AEMTK, RGTY, NOKIA Robotics, , KUKA .
Проводятся выставки роботов — например, самая крупная в мире International robot exhibition ( iRex ; проводится в начале ноября раз в два года в Токио , Япония) .
Роботизация


Роботизация — вытеснение людей из производительного процесса, с заменой их на автоматизированные и роботизированные станки и производственные линии, в связи с чем высвобождаются ресурсы для развития сферы услуг .
В последние годы в мире и в России появилось множество статей о социальных рисках (безработица, неравенство и прочее), связанных с внедрением новых «безлюдных» технологий. Есть риск, что существенное число рабочих мест будут автоматизированы, что потребует переобучения и поиска новых мест и форм занятости для миллионов специалистов; в России — около 44 % работников, потенциально подвержено этим процессам . В экономике действуют компенсационные механизмы и различные барьеры, снижающие скорость подобных изменений и способствующие адаптации рынков труда . Среди таких механизмов: переобучение и повышение квалификации рабочей силы ( STEAM ), развитие новых отраслей (например, ИКТ , креативные индустрии ), развитие предпринимательства и др .
В исторической перспективе технологический прогресс создавал больше рабочих мест, чем сокращал; а старое поколение постепенно уходило с рынка труда по мере смены технологий . Но есть риск, что скорость изменений после 2020 г. может быть слишком высока, и часть населения будет не готова к постоянному обучению и конкуренции с роботами. Они сформируют так называемую « » .
Кризис 2020 г. ускорил цифровую трансформацию экономики: удаленная работа, онлайн-обучение, заказы через интернет, автоматизация процессов и т. д. и снова обострил дискуссию о социальных рисках цифровизации и автоматизации .
Моделизм
Существует направление моделизма , которое подразумевает создание как радиоуправляемых, так и автономных роботов.
Проводятся соревнования по нескольким основным направлениям.
- DARPA Grand Challenge — соревнования автоматических автомобилей.
- « Битвы роботов » (англ. Robot Wars) — телешоу соревнований между роботами (Великобритания, 1998—2004).
- Первые Олимпийские игры роботов-андроидов 2010 (21—23 июня 2010 года, Харбин ).
Российские соревнования мобильных роботов:
- Молодёжный научно-технический фестиваль «Мобильные роботы»
- Российская национальная лига евробот
- «Робофест» в Москве
К соревнованиям автономных роботов относятся: перемещение по контрастной полосе на скорость, борьба сумо , футбол роботов .
Изобретатель Пит Редмонд (Pete Redmond) создал робота RuBot II, который может собрать кубик Рубика за 35 секунд. А в 2016 году робот Sub1 собрал кубик Рубика за 0,637 секунды.
Роботы в культуре

Роботы как культурный феномен появились с пьесой Карела Чапека « R.U.R. », описывающей конвейер , на котором роботы собирают самих себя. С развитием технологии люди всё чаще видели в механических созданиях нечто большее, нежели просто игрушки. Литература отразила страхи человечества по поводу возможности замены людей их собственными творениями. В дальнейшем эти идеи развиваются в фильмах « Метрополис » (1927), « Бегущий по лезвию » (1982) и « Терминатор » (1984). Как роботы с искусственным интеллектом становятся реальностью и взаимодействуют с человеком, показано в фильмах « Искусственный разум » (2001) режиссёра Стивена Спилберга и « Я, робот » (2004) режиссёра Алекса Пройаса.
Из научной фантастики известны три закона роботехники , впервые сформулированные Айзеком Азимовым (с помощью Джона Кэмпбелла ) в рассказе «Хоровод» (1942):
- Робот не может причинить вред человеку или своим бездействием допустить, чтобы человеку был причинён вред.
- Робот должен повиноваться всем приказам, которые даёт человек, кроме тех случаев, когда эти приказы противоречат Первому Закону.
- Робот должен заботиться о своей безопасности в той мере, в которой это не противоречит Первому и Второму Законам.
Оригинальный текст (англ.)
- A robot may not injure a human being or, through inaction, allow a human being to come to harm.
- A robot must obey orders given it by human beings except where such orders would conflict with the First Law.
- A robot must protect its own existence as long as such protection does not conflict with the First or Second Law.
В Японии обрели популярность аниме , в которых фигурируют роботы. Символами японской анимации стали такие серии, как « Трансформеры », « Gundam », « Voltron », « Neon Genesis Evangelion », « Гуррен-Лаганн ». Во многом благодаря этому с 1980—1990 годов роботы стали частью национальной культуры Японии, а также частью стереотипов о ней. [ источник не указан 3167 дней ]
Существует жанр видеоигр, непосредственно связанный с роботами — симуляторы меха . Наиболее известным представителем этого жанра является серия игр MechWarrior . В таких играх, как Lost Planet , Shogo: Mobile Armor Division , Quake IV , Chrome , Unreal Tournament 3 , Battlefield 2142 , F.E.A.R. 2: Project Origin , Tekken , Mortal Kombat , имеется возможность управлять роботами. Ещё одним примером видеоигры с участием роботов является Scrapland .
В браузере
Mozilla Firefox
, начиная с 3-й версии, есть специфичная страница
about:robots
—
виртуальное пасхальное яйцо
с шуточным посланием от роботов к людям.
В 2007 году в Германии была создана музыкальная группа Compressorhead , состоящая из роботов и играющая в стиле хеви-метал .
См. также
- Автоматон
- Манипулятор (механизм)
- Устройство телеприсутствия
- Робототехника
- Гомункул
- Киборг
- Дроид
- Искусственный интеллект
- Модульный робот
- Восстание машин
- Эквивалентное время работы робота
Прочее:
- Зал славы роботов
- Microsoft Robotics Developer Studio — ПО Microsoft для написания ПО для роботов
- Klaatu barada nikto
Примечания
- — статья из энциклопедии «Кругосвет»
- Робот // Большая советская энциклопедия : [в 30 т.] / гл. ред. А. М. Прохоров . — 3-е изд. — М. : Советская энциклопедия, 1969—1978.
- Бернштейн П. // "Квант" : журнал. — 1987. — Июнь ( № 6 ). — С. 17 . 21 января 2019 года.
- . — Nakl. Československé akademie věd., 1980-01-01. — С. 157. — 792 с.
- Чапек // Большая советская энциклопедия : [в 30 т.] / гл. ред. А. М. Прохоров . — 3-е изд. — М. : Советская энциклопедия, 1969—1978.
- ↑ . Дата обращения: 4 июня 2016. 24 февраля 2015 года.
- , с. 6.
- . Дата обращения: 14 сентября 2008. Архивировано из 16 ноября 2012 года.
- King, Elizabeth. // Blackbird. — 2002. — Vol. 1, no. 1. 10 октября 2006 года. (Дата обращения: 10 октября 2015)
- [lib.ru/SOCFANT/CHAPEK/rur.txt РУР]
- . Дата обращения: 8 октября 2014. 13 октября 2014 года.
- , с. 3.
- , с. 174.
- // Lenta.ru (1 мая 2015). Дата обращения: 2 мая 2015. 2 мая 2015 года.
- . Дата обращения: 27 декабря 2013. Архивировано из 27 декабря 2013 года.
- ↑ Элизабет Бро. // Metro Москва . — 2012. — № 14 за 22 февраля . — С. 10 . 27 декабря 2013 года.
- . Дата обращения: 27 декабря 2013. 27 декабря 2013 года.
- Пономарёв, Фёдор . Техсигнал (21 сентября 2015). Дата обращения: 1 сентября 2021. 1 сентября 2021 года.
- . Lenta.ru (3 апреля 2009). Дата обращения: 8 января 2010. 19 сентября 2011 года.
- . ТАСС (16 мая 2016). Дата обращения: 17 мая 2016. 21 мая 2016 года.
- Градецкий В. Г., Вешников В. Б., Калиниченко С. В., Кравчук Л. Н. . Управляемое движение мобильных роботов по произвольно ориентированным в пространстве поверхностям. — М. : Наука , 2001. — 360 с.
- Градецкий В. Г., Князьков М. М., Кравчук Л. Н. Методы движения миниатюрных управляемых внутритрубных роботов // Нано- и микросистемная техника. — 2005. — № 9 . — С. 37—43 .
- Kazuhiro Nakada, Yozo Ishii. . // HiBot Corporation . Дата обращения: 10 октября 2015. 28 сентября 2015 года.
- Борн, Денис. . // Электронное издание 3DNews — Daily Digital Digest (16 ноября 2009). Дата обращения: 10 октября 2015. 4 марта 2016 года.
- Киселёва А. В., Корецкий А. В. . Анализ движения робота на линии в окрестности опор высоковольтных ЛЭП // / Под ред. М. Н. Кирсанова . — М. : ИНФРА-М, 2015. — 120 с. — (Научная мысль). — ISBN 978-5-16-011287-9 . 4 декабря 2021 года. — С. 70—83.
- от 11 октября 2011 на Wayback Machine (недоступная ссылка с 22-05-2013 [3891 день] — , )
- Hirose S. . Biologically Inspired Robots: Snake-Like Locomotors and Manipulators (англ.) . — Oxford: Oxford University Press, 1993. — 240 p.
- Gonzáles-Gómez J., Aguayo E., Boemo E. . Locomotion of a Modular Worm-Like Robot Using a FPGA-based Embedded MicroBlaze Soft-processor // Proc. 7th Intern. Conf. on Climbing and Walking Robots, CLAWAR 2004. Madrid, Sept. 2004. — Madrid, 2004. — P. 869—878.
- . Дата обращения: 2 июля 2011. Архивировано из 24 августа 2011 года.
- . Дата обращения: 2 июля 2011. 19 ноября 2011 года.
- . Дата обращения: 2 июля 2011. 13 мая 2011 года.
- . Дата обращения: 2 июля 2011. 4 декабря 2010 года.
- Ostrowski J., Burdick J. . Gait Kinematics for a Serpentine Robot // Proc. IEEE Intern. Conf. on Robotics and Automation. Minneapolis, 1996. — New York, 1996. — P. 1294—1299.
- Осадченко Н. В. , Абдельрахман А. М. З. Компьютерное моделирование движения мобильного ползающего робота // Вестник МЭИ. — 2008. — № 5 . — С. 131—136 .
- Голубев Ю. Ф. , Корянов В. В. Построение движений инсектоморфного робота, преодолевающего комбинацию препятствий с помощью сил кулоновского трения // Известия РАН. Теория и системы управления. — 2005. — № 3 . — С. 143—155 .
- , с. 226.
- (недоступная ссылка)
- от 30 июня 2009 на Wayback Machine // Дни.Ру , 24.06.2009
- . Дата обращения: 9 ноября 2013. 9 ноября 2013 года.
- от 9 ноября 2013 на Wayback Machine (69 фото+видео)
- от 12 апреля 2019 на Wayback Machine // НВО НГ , 12.04.2019
- Daron Acemoglu, Pascual Restrepo. (англ.) // American Economic Review. — 2018-06-01. — Vol. 108 , iss. 6 . — P. 1488–1542 . — ISSN . — doi : .
- Carl Benedikt Frey, Michael A. Osborne. (англ.) // Technological Forecasting and Social Change. — 2017-01. — Vol. 114 . — P. 254–280 . — doi : . 8 марта 2021 года.
- Земцов С.П. Роботы и потенциальная технологическая безработица в регионах России: опыт изучения и предварительные оценки // Вопросы экономики. — 2017. — № 7 . — С. 142—157 . — doi : .
- ↑ Р. И. Капелюшников. Вопросы экономики (20 ноября 2017). Дата обращения: 24 мая 2021. 24 мая 2021 года.
- ↑ Земцов С.П. Цифровая экономика, риски автоматизации и структурные сдвиги в занятости в России // Социально-трудовые исследования. — 2019. — № 3 . — С. 6—17 . — doi : .
- Vivarelli M. . — Aldershot: Elgar, 1995. — ISBN 978-1-85898-166-6 .
- Степан Земцов, Вера Баринова, Роза Семёнова. // Форсайт. — 2019. — Т. 13 , вып. 2 . — С. 84–96 . — ISSN . 24 мая 2021 года.
- Земцов С.п. // Инновации. — 2018. — Вып. 4 (234) . — С. 49–55 . — ISSN . 24 мая 2021 года.
- Общество и пандемия: опыт и уроки борьбы с COVID-19 в России. — Москва, 2020. — 744 с. — ISBN 978-5-85006-256-9 .
- Stepan Zemtsov. (англ.) // Regional Science Policy & Practice. — 2020-08. — Vol. 12 , iss. 4 . — P. 723–743 . — ISSN . — doi : .
- . Дата обращения: 23 июня 2010. 26 июня 2010 года.
- . Дата обращения: 21 февраля 2009. Архивировано из 6 июня 2012 года.
- . Дата обращения: 21 февраля 2009. Архивировано из 23 февраля 2009 года.
- Михайлов, Алик. . Занимательная робототехника . из оригинала 1 октября 2017 . Дата обращения: 1 октября 2017 .
- Бережной, Сергей. . Русская фантастика (1994). Дата обращения: 17 мая 2016. 5 января 2012 года.
Литература
- Макаров И. М. , Топчеев Ю. И. . Робототехника: История и перспективы. — М. : Наука ; Изд-во МАИ, 2003. — 349 с. — (Информатика: неограниченные возможности и возможные ограничения). — ISBN 5-02-013159-8 .
- Гэри Маркус, Эрнест Дэвис. Искусственный интеллект: Перезагрузка. Как создать машинный разум, которому действительно можно доверять = Rebooting AI: Building Artificial Intelligence We Can Trust. — М. : Интеллектуальная Литература, 2021. — 304 с. — ISBN 978-5-907394-93-3 .
Ссылки
- , журнал «Лучшие компьютерные игры», № 10 (83) октябрь 2008 года
- — последние достижения в роботостроении на начало 2010 года
- // RobotOnline.net
- фирмы Boston Dynamics (видео), март 2008 года
- Лунев В. Д.
| Основные статьи | |
|---|---|
| Типы роботов | |
| Известные роботы | |
| Связанные термины | |
- 2021-02-01
- 1