![{\displaystyle D_{max}={\sqrt[{4}]{\frac {P_{n}D_{a}S_{a}\sigma }{\left(4\pi \right)^{2}P_{n.min}}}}}](/images/008/293/8293446/3.jpg?rand=477989)






Бартон, Дэвид Нокс
- 1 year ago
- 0
- 0

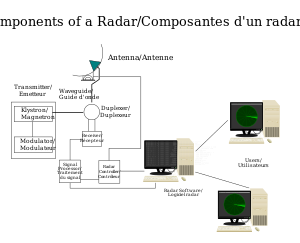
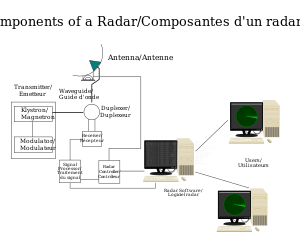
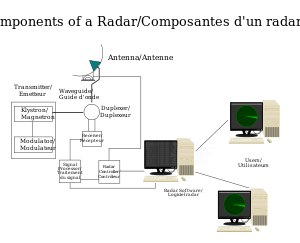
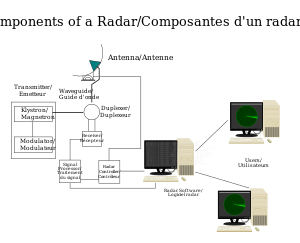
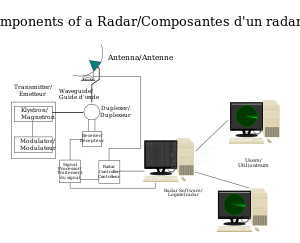
Радиолока́ция — область науки и техники , объединяющая методы и средства локации ( обнаружения и измерения координат) и определения свойств различных объектов с помощью радиоволн . Близким и отчасти перекрывающимся термином является радионавигация , однако в радионавигации более активную роль играет объект, координаты которого измеряются, чаще всего это определение собственных координат. Основное техническое приспособление радиолокации — радиолокационная станция (РЛС, англ. radar ).
Различают активную, полуактивную, активную с пассивным ответом и пассивную радиолокацию. Радиолокаторы различаются по используемому диапазону радиоволн, по виду зондирующего сигнала, числу применяемых каналов, числу и виду измеряемых координат, месту установки РЛС.
Выделяют два вида радиолокации:
Активная радиолокация бывает двух видов:

Для просмотра окружающего пространства РЛС использует различные способы обзора за счёт перемещения направленного луча антенны РЛС:
В соответствии с видом излучения РЛС делятся на:
Радиотеплолокация использует собственное излучение объектов, вызываемое тепловым движением электронов.
Радиолокация основана на следующих физических явлениях:
Используются в основном для определения радиальной скорости движущегося объекта (использует эффект Доплера ). Достоинством РЛС такого типа является дешевизна и простота использования, однако в таких РЛС сильно затруднено измерение расстояния до объекта. Наибольшее распространение получил фазовый метод измерения дальности .
Пример: простейший радар для определения скорости автомобиля.
При импульсном методе радиолокации передатчики генерируют колебания в виде кратковременных импульсов, за которыми следуют сравнительно длительные паузы. Причём длительность паузы выбирается исходя из дальности действия РЛС D max .
Сущность метода состоит в следующем:
Передающее устройство РЛС излучает энергию не непрерывно, а кратковременно, строго периодически повторяющимися импульсами, в паузах между которыми происходит приём отражённых импульсов приёмным устройством той же РЛС. Таким образом, импульсная работа РЛС даёт возможность разделить во времени мощный зондирующий импульс, излучаемый передатчиком и значительно менее мощный эхо-сигнал. Измерение дальности до цели сводится к измерению отрезка времени между моментом излучения импульса и моментом приёма, то есть временем движения импульса до цели и обратно.
Максимальная дальность действия РЛС зависит от ряда параметров и характеристик как антенной системы станции, мощности излучаемого сигнала, и чувствительности приёмника системы. В общем случае без учёта потерь мощности в атмосфере, помех и шумов дальность действия системы можно определить следующим образом:
где:
При наличии шумов и помех дальность действия РЛС уменьшается.
На загруженных участках, где одновременно используются многочисленные РЛС (например, морские порты) вероятны совпадения частотных диапазонов. Это приводит к приему РЛС сигнала другой РЛС. В результате на экране появляются дополнительные точки, бросающиеся в глаза из-за своей геометрической правильности. Эффект может быть убран переходом на другую рабочую частоту.
При отражении радиосигнала от массивного объекта возможно дальнейшее распространение к меньшим объектам с последующим отражением и попаданием в РЛС. Таким образом, путь, который прошел сигнал становится больше и на экране появляется мнимое изображение объекта, который на самом деле находится в другом месте. Такой эффект должен приниматься во внимание при нахождении вблизи крупных отражающих объектов, таких как мосты, гидротехнические сооружения и крупные суда.
При размещении РЛС на большом судне возможен эффект многократного отражения сигнала. Сигнал РЛС отражается от близкого объекта, частично попадает обратно в РЛС, а частично отражается от корпуса суда. Таких отражений может быть много, амплитуда при каждом отражении уменьшается и сигнал будет восприниматься до тех пор, пока не будет достигнута пороговая чувствительность приемника. На экране радара будут видны несколько уменьшающихся с каждым разом объектов. Расстояние между ними пропорционально расстоянию от РЛС до объекта.
Атмосферные потери особенно велики в сантиметровом и миллиметровом диапазонах и вызываются дождем, снегом и туманом, а в миллиметровом диапазоне также кислородом и парами воды. Наличие атмосферы приводит к искривлению траектории распространения радиоволн (явление рефракции). Характер рефракции зависит от изменения коэффициента преломления атмосферы при изменении высоты. Из-за этого траектория распространения радиоволн искривляется в сторону поверхности земли.
|
|
Этот раздел
не завершён
.
|
Эффект отражения радиоволн от твердых тел впервые обнаружил немецкий физик Генрих Герц в 1886 году . Использовать эффект на практике мешало рассеивание радиоволн: на объект локации их попадало меньше одной миллиардной части. Лишь в 1930-х годах , в связи с развитием авиации, ведущие страны мира начали исследовать возможность применения радиолокации для целей противовоздушной обороны . Идея радиолокации была известна задолго до Второй Мировой войны и трудно назвать того, кто первым высказал её. По данным германских историков, первым, кто (в 1902 году ) создал и успешно испытал на судах, ходивших по Рейну , практически действующий образец того, что теперь называют «радиолокационная станция» (изобретатель называл её «телемобилоскоп»), был живший и работавший в Кёльне германский инженер (встречается также написание и произношение Хюльсм а йер). В 1904 году он получил патент на «Способ сигнализации об отдалённых объектах при помощи электрических волн» . Но в разных странах традиционно чтут разных изобретателей радиолокации. Вообще же — её идея долго (с момента обнаружения эффекта) не находила воплощения в практической деятельности. Первое практическое применение радиолокации было реализовано в 1932 году в СССР в установке «Рапид». Первые в мире РЛС, принятые на вооружение и выпускавшиеся серийно, были в СССР с 1939 года.
Радары Великобритании Второй Мировой Войны англ. , англ. , англ. .
Советник премьер-министра Черчилля по науке, профессор Ф. А. Линдеманн ( ), отозвался о разработке радиолокационного бомбардировочного прицела H2S коротко: «Это дешевка». Между тем H2S дал британским бомбардировочным силам не только прицел для бомбометания при ограниченной видимости, но и навигационное средство . Установка радиолокационных взрывателей в снаряды снизила на порядок расход количества снарядов, необходимых для того, чтобы сбить один самолёт-снаряд « Фау-1 » и интенсивность таких налетов значительно снизилась. К началу Второй Мировой Войны в Великобритании была развернута система радиолокационных станций Chain Home . История создания радиолокационных станций показана в британском документальном фильме .
См. также
|
|
Этот раздел статьи
ещё
не написан
.
|
Для защиты городов от налетов бомбардировщиков немцы использовали зенитные батареи, управляемые станциями орудийной наводки (СОН) типа «Вюрцбург». Разведка союзников установила, что несущая частота этих станций равна 560 мегагерцам. Летом 1943 года бомбардировщики 8-й американской воздушной армии были оснащены передатчиками типа «Карпет» . Передатчики излучали помеху — спектр частот при средней частоте 560 мегагерц. В октябре 1943 года подвели первый итог: самолетов с «Карпетом» было сбито в два раза меньше, чем без него.
Из трех новых важнейших видов оружия второй мировой войны — реактивных снарядов, радарных установок и атомных бомб — большое влияние на ход войны оказала только радарная техника.
— Генерал-лейтенант в отставке, инженер Эрих Шнейдер. «Итоги Второй мировой войны» СПб.: Полигон; М.: АСТ, 1998
Во время Второй Мировой Войны в Германии была развернута система радиолокационных станций « Линия Каммхубера ».
|
|
Этот раздел статьи
ещё
не написан
.
|
В Советском Союзе осознание необходимости средств обнаружения авиации, свободных от недостатков звукового и оптического наблюдения, привела к разворачиванию исследований в области радиолокации. Идея, предложенная молодым артиллеристом П. К. Ощепковым, получила одобрение высшего командования: наркома обороны СССР К. Е. Ворошилова и его заместителя — М. Н. Тухачевского .
В 1932 году на базе Ленинградского физико-технического института был создан Ленинградский электрофизический институт (ЛЭФИ) под руководством А. А. Чернышёва , в котором проводились исследовательские и опытно-конструкторские работы по радиолокации. В 1935 году ЛЭФИ был расформирован, а на его базе организован «закрытый» институт НИИ-9 с оборонной тематикой, включавшей и радиолокацию. Научным руководителей его стал М. А. Бонч-Бруевич . Работы по радиолокации были начаты и в УФТИ в Харькове. К началу войны усилиями учёных и инженеров ЛЭФИ, НИИ-9 и других организаций были созданы опытные наземные радиолокационные станции .
3 января 1934 года в СССР был успешно проведён эксперимент по обнаружению самолёта радиолокационным методом. Самолёт, летящий на высоте 150 метров, был обнаружен на дальности 600 метров от радарной установки. Эксперимент был организован представителями Ленинградского института электротехники и Центральной радиолаборатории . В 1934 году маршал Тухачевский в письме правительству СССР написал: «Опыты по обнаружению самолётов с помощью электромагнитного луча подтвердили правильность положенного в основу принципа». Первая опытная установка «Рапид» была опробована в том же году . Передатчик был установлен на крыше дома № 14 по Красноказарменной улице, Москва, приёмник — в районе посёлка Новогиреево ; присутствовали М. Н. Тухачевский, Н. Н. Нагорный , М. В. Шулейкин . Аппаратуру демонстрировал П. К. Ощепков. В 1936 году советская сантиметровая радиолокационная станция «Буря» засекала самолёт с расстояния 10 километров . Первые РЛС в СССР, принятые на вооружение РККА и выпускавшиеся серийно, были: РУС-1 — с 1939 года и РУС-2 — с 1940 года.
4 июля 1943 года в соответствии с Постановлением ГКО от № 3686сс «О радиолокации» был сформирован Совет по радиолокации при ГКО . Его инициаторами стали военный инженер М. М. Лобанов и учёный А. И. Берг .
В США одним из пионеров радиолокации был .
См. также .
Основным фактором, ограничивающим технические характеристики локаторов, является малая мощность принимаемого сигнала. При этом мощность принимаемого сигнала убывает как четвёртая степень дальности (то есть, чтобы увеличить дальность действия локатора в 10 раз нужно увеличить мощность передатчика в 10000 раз). Естественно, на этом пути быстро пришли к пределам, преодолеть которые было далеко не просто. Уже в самом начале развития был осознан тот факт, что имеет значение не сама мощность принимаемого сигнала, а его заметность на фоне шумов приёмника. Снижение шумов приёмника также было ограничено естественными шумами элементов приёмника, например тепловыми. Данный тупик был преодолён на пути усложнения методов обработки принятого сигнала и связанного с этим усложнения формы применяемых сигналов. Развитие радиолокации как научной отрасли знаний шло одновременно с развитием кибернетики и теории информации , и потребовались бы специальные исследования, чтобы решить, где именно были получены первые результаты. Следует отметить появление понятия сигнала , который позволил отвлечься от конкретных физических процессов в приёмнике, таких как напряжение и ток, и позволил решать стоящие проблемы как математическую задачу о поиске наилучших функциональных преобразованиях функций времени.
Одной из первых работ в этой области была работа В. А. Котельникова об , то есть наилучшем в условии шумов методе обработки сигнала. В результате было доказано, что качество приёма зависит не от мощности сигнала, а от его энергии , то есть произведения мощности на время, таким образом, появилась доказанная возможность увеличения дальности действия за счёт увеличения длительности сигналов, в пределе до непрерывного излучения. Значительным шагом вперед стало отчётливое применение в технике методов статистической теории решений ( ) и принятие того факта, что исправное устройство может работать с определённой долей вероятности. Для того, чтобы радиолокационный сигнал при большой длительности позволял измерять дальность и скорость с высокой точностью, потребовались , в отличие от простых радиолокационных импульсов, изменяющие какие-либо характеристики в процессе генерации. Так. сигналы с линейной частотной модуляцией изменяют частоту колебаний в течение одного импульса, сигналы с фазовой манипуляцией скачкообразно изменяют фазу сигнала, обычно на 180 градусов. При создании сложных сигналов было сформулировано понятие , показывающей связь точности измерений дальности и скорости. Необходимость повышения точности измерения параметров стимулировало развитие различных методов , например, методов оптимальной нелинейной фильтрации, которые явились обобщением фильтра Кальмана на нелинейные задачи. В итоге всех этих разработок теоретическая радиолокация оформилась как самостоятельная сильно математизированная отрасль знаний, в которой значительную роль имеют формализованные методы синтеза , то есть проектирование ведётся в известной мере «на кончике пера».
Основными моментами в противостоянии с авиацией были:
Восхищённый успехами советской науки и техники в области радиолокации, глава советского правительства Н. С. Хрущёв сказал, что:
«Отныне мы — советские люди — способны в космосе попадать в комара.»
|
|
|
|---|---|
| В библиографических каталогах |
|
|
|
Некоторые
внешние ссылки
в этой статье
ведут на сайты, занесённые в
спам-лист
|