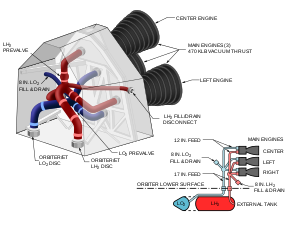
RS-25
- 1 year ago
- 0
- 0

.jpg)
Управление вектором тяги (УВТ) реактивного двигателя — отклонение реактивной струи двигателя от направления, соответствующего крейсерскому режиму.
В настоящее время управление вектором тяги обеспечивается, в основном, за счёт поворота всего сопла или его части.
Первые опыты, связанные с практической реализацией изменяемого вектора тяги на самолётах, относятся к 1957 году и проводились в Великобритании в рамках программы по созданию боевого самолёта с вертикальным взлётом и посадкой . Прототип под обозначением Р.1127 был оснащён двумя поворачивающимися на 90° соплами, расположенными по бокам самолёта на линии центра тяжести, которые обеспечивали движение в вертикальном, переходном и горизонтальном режимах полёта. Первый полёт Р.1127 состоялся в 1960 году, а в 1967 году на его базе был создан первый серийный СВВП « Харриер ».
Существенным шагом вперёд в разработке двигателей с изменяемым вектором тяги в рамках программ СВВП стало создание в 1987 советского сверхзвукового СВВП Як-141 . Принципиальной отличительной чертой данного самолёта стало наличие трёх двигателей: двух подъёмных и одного подъёмно-маршевого с поворотным соплом, расположенным между хвостовыми балками. Трёхсекционная конструкция сопла подъёмно-маршевого двигателя делала возможным поворот вниз от горизонтального положения на 95°.
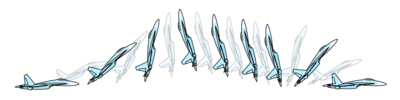
Ещё в ходе работ над Р.1127 испытателями было замечено, что использование отклоняемого вектора тяги в полёте несколько облегчает маневрирование самолёта. Однако из-за недостаточного уровня развития технологии и приоритетности программ СВВП серьёзные работы в области повышения манёвренности за счёт ОВТ не велись до конца 1980-х годов.
В 1988 году на базе истребителя F-15 B был создан экспериментальный самолёт с двигателями с плоскими соплами и отклонением вектора тяги в вертикальной плоскости. Результаты испытательных полётов показали высокую эффективность ОВТ для повышения управляемости самолёта на средних и больших углах атаки .
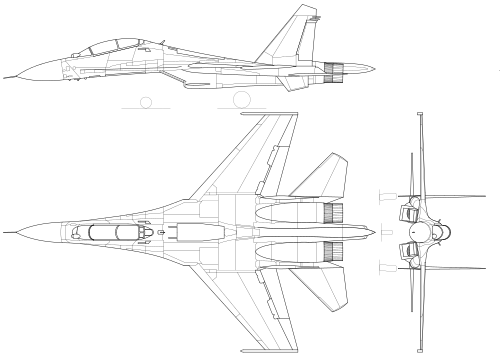
Приблизительно в то же время в Советском Союзе был разработан двигатель с осесимметрическим отклонением сопла кругового сечения, работы над которым велись параллельно с работами над плоским соплом с отклонением в вертикальной плоскости. Поскольку установка плоского сопла на реактивный двигатель сопряжена с потерей 10-15 % тяги, предпочтение было отдано круглому соплу с осесимметрическим отклонением, и в 1989 году состоялся первый полёт истребителя Су-27 с экспериментальным двигателем.

Для схемы с отклонением потока в дозвуковой части характерно совпадение угла механического отклонения с газодинамическим. Для схемы с отклонением только в сверхзвуковой части газодинамический угол отличается от механического.
Конструкция схемы сопла, представленная на рис. 1а , должна иметь дополнительный узел, обеспечивающий отклонение сопла целиком. Схема сопла с отклонением потока только в сверхзвуковой части на рис. 1б фактически не имеет никаких специальных элементов для обеспечения отклонения вектора тяги. Различия в работе этих двух схем выражаются в том, что для обеспечения одного и того же эффективного угла отклонения вектора тяги схема с отклонением в сверхзвуковой части требует больших .
Представленные схемы также требуют решения проблем обеспечения приемлемых массо-габаритных характеристик, надёжности , ресурса и быстродействия.
Имеются две схемы управления вектором тяги:
Высокой эффективности управления вектором тяги можно добиться с помощью газодинамического управления вектором тяги ( ГУВТ ) за счёт асимметричной подачи управляющего воздуха в тракт сопла.

.jpg)
Газодинамическое сопло использует для изменения сопла и отклонения вектора тяги , при этом механически сопло не регулируется. В этом сопле отсутствуют горячие высоконагруженные подвижные детали , оно хорошо компонуется с конструкцией ЛА , что уменьшает массу последнего.
Внешние контуры неподвижного сопла могут плавно вписываться в , улучшая характеристики конструктивной малой заметности . В этом сопле воздух от компрессора может направляться в инжекторы в и в расширяющейся части для изменения соответственно критического сечения и управления вектором тяги.
В МАИ были проведены экспериментальные работы по управлению вектором тяги за счёт взаимодействия «дешёвого» атмосферного воздуха с основной струёй. За счёт перераспределения эжектируемого через боковые каналы воздуха происходит отклонение основной струи двигателя (рис. 2б) . Были разработаны и испытаны малогабаритные модельные образцы устройств с применением твердотопливных газогенераторов в качестве источников сжатого газа (рис. 2). В боковых каналах плоского эжектора, связанных с атмосферой, были установлены клапаны (3, 4 на рис. 2) с электромагнитным управлением. Температура газа в газогенераторе составляла 2600 К, рабочее давление до 5..7 МПа . Развиваемая управляемая тяга 1,0 . Время переключения тяги из одного крайнего положения в другое не превышало 0,02 с. Удельная мощность управляющего сигнала на единицу тяги составляла не более 0,05..0,7 .
Проведённые испытания показали возможность отклонения вектора тяги на углы ±20° при прилипании струи к боковой стенке эжекторного сопла.
В ЦИАМ проводились предварительные исследования на физико-математической модели сопла с газодинамическим управлением вектором тяги двигателя для учебно-тренировочного самолёта (УТС) в 2D постановке. В ТРДД для УТС наличие второго контура со сжатым и относительно холодным воздухом, отсутствие необходимости регулирования проходных сечений облегчает реализацию концепции сопла с газодинамическим управлением вектором тяги.
В исследуемом сопле выходной канал второго контура разделён продольными перегородками на четыре сектора с установленными на входе в каждый сектор устройствами регулирования расхода воздуха. Это сопло на режиме осевого истечения представляет собой сопло эжекторного типа с «жидкой» стенкой (рис. 4) , однако в нём эжектируемый воздух поступает не из атмосферы, а из-за вентилятора, следовательно, имеет достаточно высокое давление. Стенка сопла первого контура разорвана сразу за его критическим сечением, поэтому выходящая из него струя газа расширяется, постоянно уменьшая к выходу площадь струи второго контура (перепад на вентиляторе околокритический).
Для принятых значений параметров на этом режиме качество рассматриваемого варианта может быть выше, чем при раздельном истечении. Это возможно благодаря замене двух поверхностей трения (части внутренней стенки сопла второго контура и внешней стенки сверхзвуковой части сопла первого контура) на «жидкую» стенку, а также благодаря выравниванию поля скоростей на выходе вследствие частичного смешения потоков. Кроме того, такая схема сопла может обеспечить улучшенное протекание рабочей линии вентилятора на дроссельных режимах.

Для получения максимального отклонения потока один сектор ( 2 на рис. 4 ) подвода воздуха второго контура полностью перекрывается. В результате расход через второй сектор ( 1 ) возрастает в два раза (для 2D варианта).
Отклонение струи происходит благодаря:
В настоящее время ведутся работы над 3D-вариантом такого сопла и сопла с использованием атмосферного воздуха. По предварительным оценкам рассматриваемые схемы сопел способны обеспечить вектора тяги ±20°.
Конструкции струйных сопел отличаются разнообразием силовых и газодинамических схем.
Рассмотрим конструкцию с использованием расширяющейся сверхзвуковой частью сопла для создания боковой силы тяги. С этой целью выходной раструб сопла переводится в режим перерасширения и с одной из сторон сопла, на его боковой поверхности открываются отверстия для доступа атмосферного воздуха. При этом струя из двигателя прилипает к противоположной стороне сопла.
Схема и принцип действия струйного сопла показаны на рис. 5 и рис. 6 .

Образование управляющих сил обеспечивается следующим порядком операций.

Для создания управляющих усилий в двигателе со сверхзвуковым соплом можно несколько изменить сверхзвуковую часть уже существующего сопла. Эта относительно несложная модернизация требует минимального изменения основных деталей и узлов исходного, штатного сопла.
При проектировании большая часть (до 70 %) узлов и деталей модуля сопла могут не изменяться: фланец крепления к корпусу двигателя, основной корпус, основные гидроприводы с узлами крепления, рычагами и кронштейнами , а также створки критического сечения. Изменяются конструкции надстворок и проставок расширяющейся части сопла, длина которых увеличивается, и в которых были выполнены отверстия с поворотными заслонками и гидроприводами . Кроме этого изменяется конструкция внешних створок, а для них заменяются гидроцилиндрами , с рабочим давлением до 10 МПа (100 кг/см 2 ).
Отклоняемый вектор тяги ( ОВТ ) — функция сопла , изменяющая направление истечения реактивной струи. Предназначена для улучшения тактико-технических характеристик самолёта. Регулируемое реактивное сопло с отклоняемым вектором тяги — устройство с изменяемыми, в зависимости от режимов работы двигателя, размерами критического и выходного сечений, в канале которого происходит ускорение потока газа с целью создания реактивной тяги и возможностью отклонения вектора тяги во всех направлениях.
В настоящее время система отклонения вектора тяги рассматривается как один из обязательных элементов современного боевого самолёта в связи со значительным улучшением лётных и боевых качеств, обусловленным её применением. Также активно изучаются вопросы модернизации имеющегося парка боевых самолётов, не имеющих ОВТ, путём замены двигателей или установки блоков ОВТ на штатные двигатели. Второй вариант был разработан одним из ведущих российских производителей ТРД — компанией «Климов», которая также выпускает единственное в мире серийное сопло с всеракурсным отклонением вектора тяги для установки на двигатели РД-33 (семейство истребителей МиГ-29) и АЛ-31Ф (истребители марки Су).
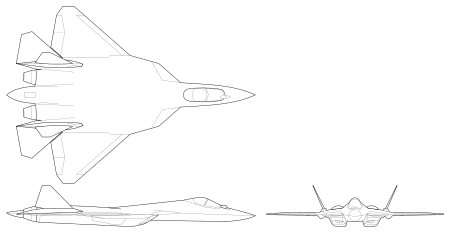
Боевые самолёты с управляемым вектором тяги: