Основной задачей кинематики является описание движения при помощи математического аппарата без анализа вызывающих это движение причин; их рассматривает
динамика
, в частности,
динамика точки
.
Всякое движение — понятие относительное и имеющее содержание только при указании, относительно каких именно тел перемещается рассматриваемый объект, поэтому движение любого объекта в кинематике изучают по отношению к некоторой
системе отсчёта
, включающей:
Положение точки определяется зависящим от времени
радиус-вектором
в выбранной системе отсчёта. Наиболее наглядное представление о радиус-векторе обеспечивается в
евклидовой системе координат
, поскольку
базис
в ней является фиксированным и общим для любого положения тела.
Содержание
Основные понятия
Материальная точка
— тело, размерами которого по сравнению с характерными расстояниями данной задачи можно пренебречь. Так, Землю можно считать Материальной Точкой (М. Т.) при изучении её движения вокруг Солнца, пулю можно считать М. Т. при её движении в поле тяжести Земли, но нельзя считать таковой при учёте её вращательного движения в стволе винтовки. При
поступательном движении
в ряде случаев при помощи понятия М. Т. можно описывать и изменение положения более крупных объектов. Так, например,
тепловоз
, проходящий расстояние 1 метр, может считаться М. Т., поскольку его
ориентация
относительно системы координат в процессе движения является фиксированной и не влияет на постановку и ход решения задачи.
Радиус-вектор
— вектор, определяющий положение материальной точки в пространстве:
. Здесь
—
координаты
радиус-вектора. Геометрически изображается вектором, проведённым из начала координат к материальной точке. Зависимость радиус-вектора (или его координат
) от времени
называется
законом движения
.
Траектория
—
Годограф
радиус-вектора, то есть — воображаемая
линия
, описываемая концом радиус-вектора в процессе движения. Иными словами, траектория — это линия вдоль которой движется материальная точка. При этом закон движения выступает как уравнение, задающее траекторию параметрически.
Длину
участка траектории между начальным и конечным моментами времени часто называют пройденным расстоянием, длиной пути или вульгарно — путём и обозначают буквой
. При таком описании движения
выступает в качестве
обобщённой координаты
, а законы движения в этом случае записывается в виде
и аналогичны соответствующим законам для координат.
Описание движения при помощи понятия траектории — один из ключевых моментов
классической механики
. В
квантовой механике
движения носит бестраекторный характер, а значит само понятие траектория теряет смысл.
Основные кинематические величины
Радиус-векторы и вектор перемещения (чёрные стрелки). Векторы средней и мгновенных скоростей (Зелёные стрелки). Траектория (красная линия)
Разложение ускорения по
сопутствующему базису
Перемещение
— векторная физическая величина, равная разности радиус-векторов в конечный и начальный моменты времени:
.
Иными словами, перемещение — это приращение радиус-вектора за выбранный промежуток времени.
Средняя скорость
— векторная физическая величина равная отношению вектора перемещения к промежутку времени, за который происходит это перемещение:
.
Средняя путевая скорость
— скалярная физическая величина равная отношению модуля вектора перемещения к промежутку времени, за который происходит это перемещение, как правило имеет смысл при описании движения с
:
.
Мгновенная
скорость
— векторная физическая величина, равная первой
производной
от радиус-вектора по времени:
.
Характеризует быстроту перемещения материальной точки. Мгновенную скорость можно определить как предел средней скорости при устремлении к нулю промежутка времени, на котором она вычисляется:
.
Единица измерения скорости в системе
СИ
—
м/с
, в системе
СГС
— см/с. Мгновенная скорость всегда направлена по касательной к траектории.
Мгновенное
ускорение
— векторная физическая величина, равная второй производной от радиус-вектора по времени и, соответственно, первой производной от мгновенной скорости по времени:
.
Характеризует быстроту изменения скорости. Единица ускорения в системе СИ— м/с², в системе СГС — см/с².
Описание в декартовой системе координат
Поскольку базисные векторы (
) в этой системе координат
ортонормированы
и не зависят от времени, то закон движения запишется следующим образом:
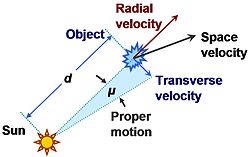
Описание движения ведётся в плоскости. Положение точки определяется
— расстоянием от начала координат и полярным углом
, отсчитываемым от какой-то фиксированной оси. В качестве базиса вводятся единичный вектор
, направленный из начала координат на движущуюся точку, и единичный
перпендикулярный первому в сторону возрастания угла
(это направление называется трансверсальным).
Связь с декартовой системой можно выразить следующим образом:
.
При описании в сопутствующей системе координат рассматриваются три последовательных точки траектории
. В пределе малости, первые две дают касательную к траектории, тогда как все три — окружность кривизны, лежащую в мгновенной плоскости движения (соприкасающейся плоскости). Базис выбирается следующим образом:
— единичный вектор, касательный к траектории;
— единичный вектор, лежащий в соприкасающейся плоскости, перпендикулярный вектору
и направленный в сторону вогнутости траектории (по главной нормали);
(вектор бинормали).
Ускорение, таким образом,
, где
, а
,
— мгновенный
радиус кривизны
.
В случае движения по окружности нормальное ускорение называется
центростремительным
. Как видно из предыдущей формулы, при движении по окружности с постоянной скоростью нормальное ускорение постоянно по модулю и направлено к центру окружности.
Если ИСО
движется относительно ИСО
с постоянной скоростью
вдоль оси
, а начала координат этих систем в начальный момент совпадают, то преобразования Галилея имеют вид:
В случае произвольного направления осей координат, справедлива векторная запись преобразований Галилея:
Если же движение происходит со скоростью сравнимой со скоростью света, то следует применять
преобразования Лоренца
.
Примеры движения
Равномерное прямолинейное
В данном случае
,
, откуда следует закон движения
.
Равноускоренное прямолинейное
Равноускоренное движение в поле тяжести Земли
При направлении оси
вдоль линии перемещения, закон равноускоренного движения получается в результате решения простейшего дифференциального уравнения вида:
Здесь
и
— произвольные константы, соответствующие начальной координате и начальной скорости.
Если движение ограничено по времени и известна конечная скорость
, то справедлива расчётная формула:
.
Движение с постоянным ускорением
называют
равноускоренным
. Закон которого при произвольном направлении осей:
;
.
При этом уравнения движения в координатной форме имеют аналогичный вид:
;
.
В этом случае часто говорят о
равноускоренном
движении
, если знаки
и
совпадают и о
равнозамедленном
, если
и
имеют противоположные знаки. При этом знак каждой из величин зависит от начального выбора системы отсчёта.
Равномерное по окружности
Задачу удобно рассмотреть в сопутствующем базисе. Ускорение примет вид
(центростремительное ускорение, направленное в центр окружности). Само движение можно рассмотреть в терминах угла
относительно какой-либо оси. Для
угловой скорости
:
, причём
. Период движения:
.
Точка, брошенная под углом к горизонту
Для тел, движущихся с малыми скоростями,
сопротивлением
воздуха можно пренебречь. Пусть точка в нулевой момент времени была брошена со скоростью
под углом
к
горизонту
. Для оси
, направленной вертикально вверх, и оси
, направленной по горизонту, уравнения движения в проекциях на оси:
Откуда, в частности, получаются следующие формулы:
Если точка была брошена с земли, то время движения составит
, причём точка достигнет вершины траектории за
.
Длина полёта в таком случае
, откуда следует, что максимальная дальность полёта при неизменной скорости достигается при
. В обобщении на бросок вдоль
наклонной плоскости
, максимальная дальность полёта достигается при броске вдоль
биссектрисы
между вертикалью и прямой вдоль плоскости броска.
Вообще говоря, в одну и ту же точку тело может прилететь по двум траекториям:
настильной
и
навесной
.
Уравнение траектории в рассмотренных обозначениях:
, то есть снаряд движется по
параболе
.
Случай системы точек
Для описания движения материальной точки требуется задать три обобщённых координаты, которые, вообще говоря, зависят от системы отсчёта, но их число остаётся неизменным. Иначе говоря, число
степеней свободы
точки равно трём. Однако число степеней может быть меньше, если точка, например, может двигаться лишь по определённой
поверхности
или
кривой
. Тогда говорят, что на материальную точку наложена
кинематическая связь
. Число степеней свободы от каждой связи уменьшается на одну.
В общем случае, если система состоит из
материальных точек и на них наложено
кинематических связей, число степеней свободы такой системы материальных точек будет
. Если в системе расстояния между двумя любыми точками всегда постоянны, то такая система называется абсолютно твёрдым телом (см.
Кинематика твёрдого тела
). Описанием же
макроскопических
систем материальных точек с изменяющимися расстояниями занимается
кинематика сплошной среды
.































![{\displaystyle {\vec {a}}=[{\ddot {r}}-r{\dot {\varphi }}^{2}]{\vec {e}}_{r}+[2{\dot {r}}{\dot {\varphi }}+r{\ddot {\varphi }}]{\vec {e}}_{\varphi }}](/images/008/997/8997808/34.jpg?rand=615856)



![{\displaystyle {\vec {a}}=[{\ddot {r}}-r{\dot {\varphi }}^{2}]{\vec {e}}_{r}+[2{\dot {r}}{\dot {\varphi }}+r{\ddot {\varphi }}]{\vec {e}}_{\varphi }+{\ddot {z}}{\vec {e}}_{z}}](/images/008/997/8997808/38.jpg?rand=335294)



![{\displaystyle {\vec {a}}=[{\ddot {r}}-r{\dot {\varphi }}^{2}\sin ^{2}\theta -r{\dot {\theta }}^{2}]{\vec {e}}_{r}+[(r{\ddot {\varphi }}+2{\dot {r}}{\dot {\varphi }})\sin \theta +2r{\dot {\varphi }}{\dot {\theta }}\cos \theta ]{\vec {e}}_{\varphi }+[2{\dot {r}}{\dot {\theta }}-r{\dot {\varphi }}^{2}\sin \theta \cos \theta +r{\ddot {\theta }}]{\vec {e}}_{\theta }}](/images/008/997/8997808/42.jpg?rand=725467)




![{\displaystyle {\vec {e}}_{\beta }=[{\vec {e}}_{\tau }\times {\vec {e}}_{n}]}](/images/008/997/8997808/47.jpg?rand=437963)